Extraktion von Fahrspurgeometrie und -topologie auf der Basis von Fahrzeugtrajektorien
| Leitung: | Brenner |
| Team: | Oliver Röth |
| Jahr: | 2014 |
| Laufzeit: | 2014 |
| Ist abgeschlossen: | ja |
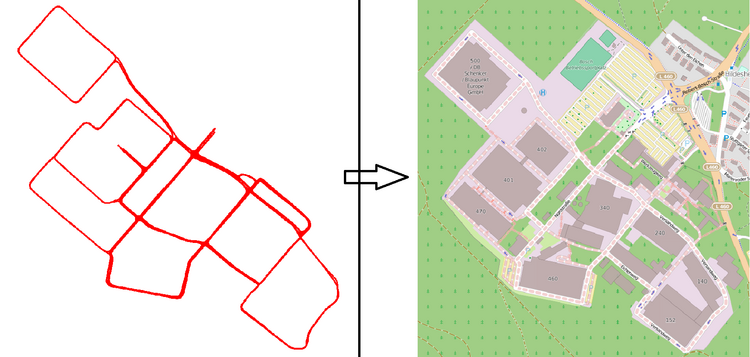
Digitale Weg- und Transportkarten sind heutzutage die Grundlage moderner Navigation und finden in Disziplinen von der Ethologie bis zur Nautik unterschiedlichste Anwendungen. Der für diese Arbeit interessante Anwendungsfall ist die Abbildung von Verkehrswegen für Fahrzeuge als Straßenkarte. Eine Straßenkarte bildet hierbei mindestens die geometrische Struktur eines Verkehrsnetzes unter Erhalt der Konnektivität ab. Dabei werden Straßenvereinigungen oder -teilungen als Knoten und die Straßen als Kanten in eine Graphenstruktur überführt. Der Anzahl an optionalen Informationen wie beispielsweise Reisezeiten oder Fahrspuranzahlen sind dabei keine Grenzen gesetzt. Die Verwendung derartiger Graphen in beispielsweise Navigationsgeräten ist inzwischen alltäglich. Flächendeckendes und sehr detailliertes Kartenmaterial wird zu diesem Zweck zwar von großen Unternehmen bereitgestellt, muss allerdings sehr aufwendig mit modernster Technik und viel menschlicher Nachbearbeitung erstellt werden. Aus diesem Grund gibt es inzwischen sehr viele theoretische Ansätze, die sich, ausgehend von per GPS aufgezeichneten Fahrzeugspuren, sogenannten Trajektorien, dem Problem der automatischen Kartenerstellung widmen (vgl. Abb. 1).
Im Rahmen dieser Masterarbeit wurden zwei Algorithmen zur Konstruktion digitaler Straßenkarten aus aufgezeichneten Trajektorien betrachtet. Interessant waren dabei die erzielbaren Ergebnisse hinsichtlich der Geometrie, respektive des Straßenverlaufes, und hinsichtlich der Topologie. Topologische Informationen beschreiben dabei die Abbiegerestriktionen an Straßenkreuzungen. Durch die gezielte Analyse der Schwachstellen dieser Verfahren wurde ein Algorithmus entwickelt, der in der Lage ist von den Verfahren vernachlässigte Informationen nachträglich zu integrieren. Diese Algorithmen wurden auf verschiedenen, teilweise im Rahmen der Arbeit aufgenommenen, Szenarien mit Trajektorien unterschiedlicher Genauigkeitsstufen zur Anwendung gebracht.
Zur Bewertung der Verfahren wurden die Ergebnisse mit Referenzmaterialien von OpenStreetMap verglichen. Insgesamt wurde den Algorithmen eine gute Ergebnisqualität bescheinigt und es ist in vielen Fällen gelungen, durch die nachträgliche Integration bestimmter Informationen die Resultate zu verbessern. Für weiterführende Arbeiten gibt es dennoch viel Potential, vor allem im Hinblick auf hochgenaue Fahrzeugtrajektorien und die Integration weiterer Sensordaten.







