Future trajectory and Motion guidance with Augmented reality
| Leitung: | Kamalasanan, Sester |
| Jahr: | 2023 |
| Ist abgeschlossen: | ja |
Introduction and goal of this thesis
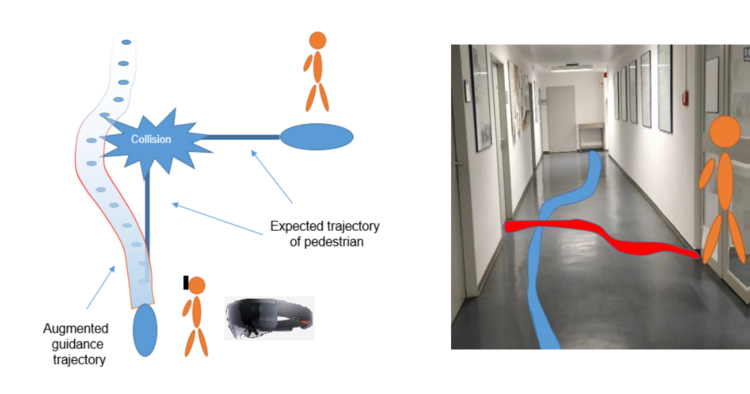
Controlling pedestrian motion pattern using augmented reality would require explainable visualizations to convince the user to change directions and speed of motion. Such AR visualizations should avoid cognitive overload and should provide motion guidance that are accurate representations of expected user actions to avoid conflicts / collisions.
The focus of this master thesis would be to design and evaluate 3D motion guidance augmentations using AR emphasizing how such visualizations can avoid collisions between pedestrian / smartphone zombie. The student is expected to design and validate motion guidance visualizations in augmented reality.
Tasks and time frame
The tasks are broken down into multiple phases to emphasis on different aspects of the topic:
1. Literature review on motion guidance using AR
2. Design an experimental setup in indoor space with dynamic positioning of virtual surrounding pedestrians (Augmented avatars) using HoloLens Toolkit
3. Visualizing 3D future trajectory in AR based on direction of motion.
4. Collision detection of HoloLens with virtual avatars in environment.
5. Design Motion guidance augmentations using design experiments / workshops
6. Motion guidance implementation with Unity and HoloLens
7. User study to evaluate the effect of guidance on the behavior of pedestrian motion
8. Writing master thesis
Resources
► Hololens 2
Requirements
► Programming skills (preferably C#)
► Knowledge with Unity and 3d graphics rendering
► Ability to work independently
Contact person(s)
M. Sc. Vinu Kamalasanan (E-Mail: vinu.kamalasanan@ikg.uni-hannover.de, Tel. 762-3726)
Prof. Monika Sester (E-Mail monika.sester@ikg.uni-hannover.de, Tel. 762-3588)
Institute of Cartography und Geoinformatics, Appelstraße 9 a, 30167 Hannover, Room 60xx & 601







