Mining GPS-Trajectory Data for Map Refinement and Behavior Detection
| Jahr: | 2017 |
| Ist abgeschlossen: | ja |
In today's world, we have increasingly sophisticated means to record the movement of moving objects such as vehicles, humans and animals in the form of spatio-temporal trajectory data. As a consequence of this development, increasing volumes of such data are being accumulated at an extremely fast rate. A trajectory is usually represented by an array of structured positions in space and time, i.e. each has a signature of specific location (geospatial coordinate tags) in time (time stamp tags). The data hold information about the representation of spatial phenomena, such as the geometry of the environment. Moreover, they also provide information about the spatio-temporal behavior of the moving objects. As a result, knowledge discovery from these data has become an important problem and is in increasing demand to understand the underlying nature of the data, and it aids in various decision making processes.
In the thesis, different approaches for the analysis of trajectories in the context of navigation and location based services are presented: the determination of the geometry of a road network, the classification of the travel mode of the moving objects, as well as the identification of different types of behavior such as anomalous driving patterns.
A novel method towards improvement of existing OSM road data from incoming, massive amounts of GPS-trajectory data is presented. We use the OSM road map as a reference map and match GPS- trajectories with corresponding roads using both geometrical and statistical method. Matching according to their travel modes is also applied to tackle errors in GPS data.
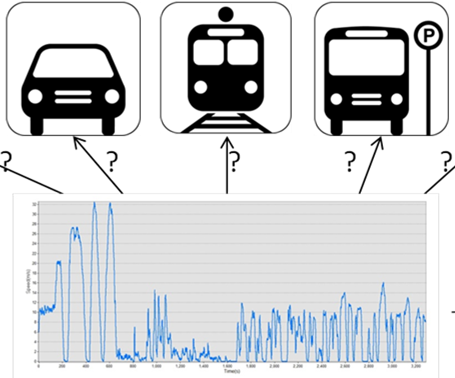
We also mine additional attribute information from such data. It is also possible to infer the travel mode from the trajectories. This can be used to identify the road type from which the GPS-trajectory is collected, and thus allows to also add semantic attributes to the geometries of the roads extracted. Other location-based services could also benefit from such information. We take six travel modes into consideration, which supposedly consists of different movement patterns: walk, bicycle, car, bus, tram and train. A two stage classification method is developed to robustly detect travel mode from trajectories. Due to the fact that GPS trajectories are often composed of more than one travel modes, they are firstly segmented as movement segments by identifying stops, which are classified as pedestrian, bicycle, and motorized vehicles to find sub-trajectories that corresponding to individual travel modes. In the second stage, a breakdown classification of the motorized vehicles class as car, bus, tram and train is implemented based on sub- trajectories using Support Vector Machines (SVMs) method.







