3D-Objektextraktion aus hochaufgelösten 3D-Punktwolken
| Leitung: | Sester, Monika |
| Team: | Politz, Florian |
| Jahr: | 2017 |
| Förderung: | Forschungs- und Entwicklungsvorhaben zwischen den Landesvermessungsämtern Niedersachsen, Schleswig-Holstein und Mecklenburg-Vorpommern |
| Laufzeit: | seit 2017 |
In den Landesvermessungsbehörden liegen flächendeckende, kontrollierte Airborne Lascerscanning-Datensätze mit unterschiedlichen Punktdichten vor, welche i.d.R. mindestens in die Klassen Boden- und Nichtbodenpunkte differenziert wurden. In der Arbeitsgemeinschaft der Vermessungsverwaltungen (AdV) wird ein Aktualisierungszyklus von 10 Jahren diskutiert. Weiterhin leiten die Landesvermessungsämter auf Basis von digitalen Bildflügen mit hohen Überlappungen 3D-Punktwolken mit dem sogenannten „Dense-Image-Matching“-Verfahren (DIM) ab, welche eine Auflösung im Pixelbereich besitzen. Radiometrische Information aus den Luftbildern ergänzen die Informationstiefe dieser Punktwolken, welche aufgrund der Bildkorrelation in der Regeln auf ein Oberflächenmodell begrenzt sind. Hierbei ist ein 2-3-jähriger Befliegungszyklus die Basis. Das Projekt lässt sich wie folgt in vier Themenschwerpunkte untergliedern.
Fusion von Datensätzen unterschiedlicher Erfassungsquellen
Die Laserscanningdaten besitzen eine individuelle, punktuelle, hohe Lage- und Höhengenauigkeit. Die DIM-Daten hingegen haben eine hohe geometrische Auflösung und enthalten zusätzlich radiometrische Information. Beide Datentypen gilt es unter dem Aspekt dieser unterschiedlichen Eigenschaften sowie weiterer Kriterien zu fusionieren.
Aktualisierung vorhandener Punktwolken mittels neu erfasster Datensätze
Sofern beide Datentypen miteinander fusioniert sind, können Qualitäten und Genauigkeiten dieser Fusion genutzt werden, um auf Basis neuer Datensätze (Laserscanning oder DIM) eine Punktverdichtung zu erreichen bzw. eine Veränderung zu detektieren.
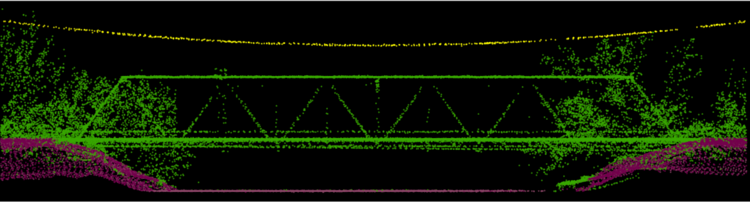
Klassifikation von Punktwolken
Zur Gewinnung von Digitalen Gelände- und Oberflächenmodellen werden die Punktwolken i.d.R. nur in die drei Klassen Boden- und Nichtbodenpunkte sowie Anderes unterteilt. Unter Anderes werden dynamische Objekte wie Autos und Züge verstanden, die weder im Gelände- noch im Oberflächenmodell auftauchen. Aufgrund der Genauigkeiten und der durch die DIM-Daten zusätzlich vorhandenen, hohen geometrischen und radiometrischen Auflösungen soll die Menge an Klassen gemäß AdV-Standard erweitert werden. Die klassifizierten Datensätze können anschließend verwendet werden, um die Aktualisierung vorhandener Punktwolken weiter zu optimieren.
3D-Linien- und Objektextraktion und Texturierung
Nachdem die 3D-Punktwolkeninformation sowohl hinsichtlich Geometrie als auch Informationstiefe optimiert wurden, sollen aus den 3D-Punktwolken zuletzt 3D-Linien, -Flächen und -Körper extrahiert werden, sodass 3D-Objekte entsprechend dem AAA-Katalog modelliert werden können. Schließlich sollen die so modellierten 3D-Objekte auf Basis der originalen Bildinformationen texturiert werden.







