Network Control System of Autonomous Vehicles
| Leitung: | Schön, Brenner, Sester |
| Team: | Abdelaal |
| Jahr: | 2019 |
| Förderung: | DFG Graduiertenkolleg i.c.sens |
| Laufzeit: | 2016-2024 |
| Ist abgeschlossen: | ja |
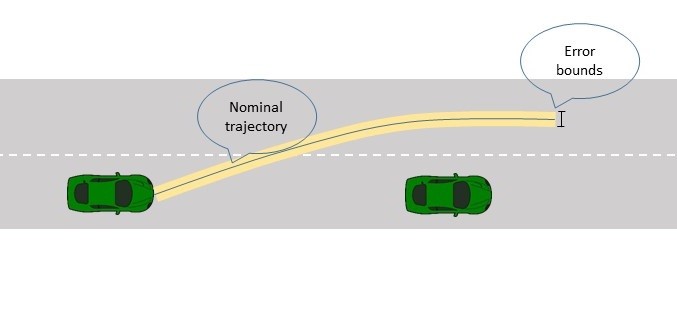
Autonomous systems, such as self-driving cars, unmanned aerial vehicles, autonomous ships, and smart robots, have gained a lot of attention from both academia and industry. Autonomous systems must be capable of planning and executing complex tasks as intended, with limited or no human intervention. They will be exposed to uncertain and unstructured uncertainties arising from modelling errors and external disturbances. With a focus on autonomous driving, this project will focus on developing a robust trajectory tracking and collision avoidance controller, which is able to guarantee error bounds on the vehicle future behaviour. This controller should employ a nonlinear model of the vehicle with a possibility of exchanging information with other vehicles or assumed intelligent traffic elements. The controller will be based on Nonlinear Model Predictive Control (NMPC) due to its ability to handle systematically state and control constraints over the future horizon, which open the door for integrating collision avoidance into the controller.







