Extraktion von Verhaltensmustern aus Trajektorien
| Leitung: | Sester, Monika |
| Team: | Zourlidou, Stefania |
| Jahr: | 2017 |
| Förderung: | IAV GmbH |
| Laufzeit: | 2016-2019 |
Inhalt
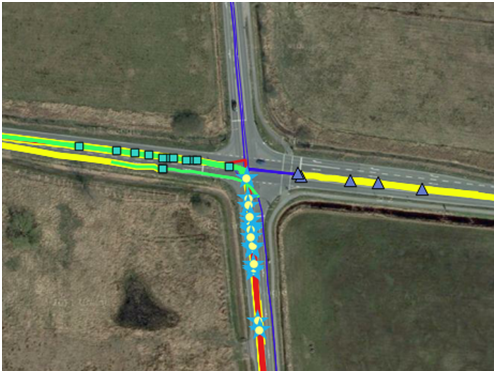
Eine Straßenkarte kann nicht nur als eine kompakte Repräsentation des Straßennetzwerks dienen, sondern auch eine Beschreibung des Fahrverhaltens der Verkehrsteilnehmer liefern, welche durch Straßenregulationen vorgeben werden. Straßenregulationen sind Regeln, die vorgeben, welche Fahrmanöver an einem Punkt erlaubt sind und welche nicht und werden vorrangig durch Verkehrsschilder realisiert. Eine Straßenkarte sollte daher nicht nur topologische und geometrische Informationen des Straßennetzwerks enthalten, sondern auch die Beschränkungen von Fahrmanövern, welche durch Verkehrsschilder angezeigt werden (z.B. Einbahnstraße, nicht links abbiegen etc.). Die Motivation, solche Information mit einzubeziehen liegt in der Sicherheit, welche gefährdet ist sobald die Verkehrsschilder missachtet werden. Navigationssysteme enthalten diese Informationen bereits, das Problem liegt jedoch in der Aktualisierung von Änderungen. Daher sollen die Verkehrsregeln automatisch aus dem Verkehrskontext abgeleitet werden, sodass Veränderungen dynamisch erkannt und beim Nutzer aktualisiert werden können.
Ziel dieser Arbeit ist, zu erforschen wie Verkehrsregeln aus Trajektorien bestimmter Fahrverhalten rekonstruiert werden können. Eine Möglichkeit ist die Anwendung von Methoden des Maschinellen Lernens auf Sensordaten von Autos anzuwenden, wie zum Beispiel GPS-Trajektorie, Bremsen, Blinken oder die Geschwindigkeit.







