Kombinierte Auswertung von Mobile Mapping Punktwolken aus Laserscans und Bildern
| Leitung: | Hofmann |
| Team: | Steven Curs |
| Jahr: | 2013 |
| Laufzeit: | 2013 |
| Ist abgeschlossen: | ja |
Mit dem Mobile Mapping System VMX-250 der Firma RIEGL LMS GmbH ist eine 3D-Objektpunktaufnahme von großen Gebieten mittels Laserscannern möglich. Die erfassten Daten weisen aufgrund von Ungenauigkeiten in der Positionsbestimmung mittels GNSS, insbesondere in innerstädtischen Gebieten oder unter Bäumen, teilweise große Koordinatenunterschiede auf. Diese werden sichtbar, wenn Gebiete mehrmals befahren werden. In den ausgewerteten Projekten wurden Höhenunterschiede in den Daten von bis zu 30 cm festgestellt, besonders deutlich ist dies in der Straßenebene zu sehen. Fehler in der Lage können festgestellt werden, indem die erzeugten Punktwolken an senkrechten Ebenen, z. B. an Fassaden, untersucht werden. Hierbei wurden Abweichungen bis zu 18 cm festgestellt.
Zusätzlich zu den beiden Laserscannern ist das VMX-250 mit mehreren Kameras ausgestattet. Diese wurden bislang nur zum Einfärben der Punktwolken genutzt. Die Grundidee der Arbeit ist es, die Aufnahmen der Kameras für eine relative Verbesserung der Trajektorien und damit der Daten zu nutzen.
Die Orientierung der Kameras, die teil-automatisch in der Auswertesoftware RiPROCESS bestimmt wird, liefert eine gute Näherung der Kameraposition und Orientierung. Dabei werden jedoch alle Bilder als Einzelbilder betrachtet und nicht die relative Orientierung zwischen den Bildern berücksichtigt. Durch die hohe Auflösung und hohe Bildrate, ist es mit geeigneten Verfahren möglich, die Parameter der Äußeren Orientierung anhand von Verknüpfungspunkten zwischen den Bildern mit guter Genauigkeit zu bestimmen. In der Arbeit wurde der Structure-from-Motion-Prozess (SfM) genutzt, mit dem die Objektkoordinaten auf wenige Zentimeter genau berechnet werden können. In Abbildung 1 ist eine mit SfM berechnete Punktwolke und Trajektorie zu sehen, bei der sogenannte SIFT-Punkte als korrespondierende Punkte verwendet wurden.
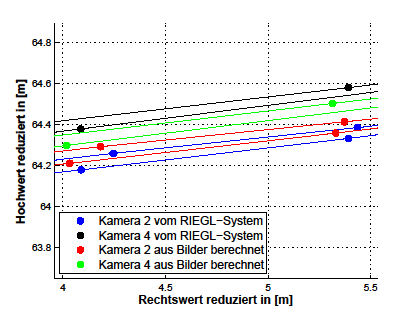
Unter der Verwendung des SfM wurde in dieser Arbeit untersucht, ob mit Hilfe der Kameraaufnahmen eine Verbesserung der Genauigkeit der Originaltrajektorie möglich ist. Weiterhin wurde untersucht, wie sich verschiedene Kamerakonfigurationen und das mehrmalige Befahren der gleichen Strecke auf die Genauigkeit der Trajektorie und der Punktwolke auswirken. Abbildung 2 stellt einen Auszug der Ergebnisse dar. Links ist die Höhe einer Trajektorie von einem zweimal befahrenen Gebiet zu erkennen. Die blauen Linien entsprechen der Originaltrajektorie und haben eine Abweichung von ca. 5 cm. Die grüne Linie gehört zur aus Bildern berechneten Trajektorie. Da etwa der gleiche Weg (gleiche Fahrspur) abgefahren wurde, sollte die Höhe nahezu identisch sein, was bei der Originaltrajektorie (blau) nicht der Fall ist. Eine deutliche Verbesserung ist dabei in der grünen Trajektorie aus Bildern zu erkennen. Abbildung 2 rechts zeigt die Höhe der Kameras 2 und 4, die auf einer stabilen Halterung nahezu horizontal auf dem Fahrzeug angebracht sind. Dadurch müssten sie sich bis auf wenige Zentimeter auf ähnlicher Höhe befinden. In der Originaltrajektorie (blaue und schwarze Linien) weisen die Kameras einen Abstand von ca. 20 cm auf. Mit Hilfe der Bilder konnte die Trajektorie auch in diesem Fall deutlich verbessert werden (grüne und rote Linien).
Die Ergebnisse der Arbeit haben gezeigt, dass die Kameras für eine Verbesserung der Trajektorie eingesetzt werden können. Sie liefern gute Ergebnisse, wenn eine ausreichende Anzahl an Kameras, mit ausreichender Überlappung in den Bildern vorliegt. Die Konfiguration der Kameras muss dafür geeignet an das Messgebiet angepasst werden.







