Laser Scanning
-
Collaborative acquisition of predictive mapsSelf-driving cars and robots that run autonomously over long periods of time need high precision and up-to-date models of the environment. Natural environments contain dynamic objects and change over time. Since a permanent observation of “everything” is impossible and there will always be a first time visit of the changed area, a map that takes into account the possibility of change is needed.Team:Year: 2017Funding: DFG-Graduiertenkolleg i.c.sens
![]()
![]()


Robotics
-
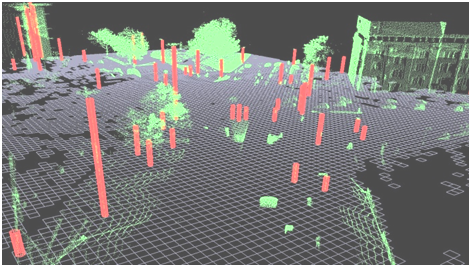
Landmark-based localizationWithin the project, new approaches are developed for a highly accurate localization of vehicles relative to their environment. Furthermore, it is analyzed how detailed descriptions of the environment can be used for interpreting the scenery, for example for active driver assistance systemsTeam:Year: 2017
![]()
![]()
-
Collaborative acquisition of predictive mapsSelf-driving cars and robots that run autonomously over long periods of time need high precision and up-to-date models of the environment. Natural environments contain dynamic objects and change over time. Since a permanent observation of “everything” is impossible and there will always be a first time visit of the changed area, a map that takes into account the possibility of change is needed.Team:Year: 2017Funding: DFG-Graduiertenkolleg i.c.sens
![]()
![]()