Mobile Mapping in 4D
| Led by: | Bock, Schlichting |
| Team: | Carolin Böhme, Dennis Elschen, Eva Kemkes |
| Year: | 2015 |
| Is Finished: | yes |
Gerade große Städte weisen eine hohe Dynamik auf, deren Analyse Antworten auf viele Fragestellungen liefern kann: Welche Straßen sind zu welcher Tageszeit belebt? Liegen räumliche Engpässe vor? Ein mobiles Multisensorsystem (kurz: MSS) bietet die Möglichkeit solche Daten schnell und für einen großen Bereich zu sammeln und in diesen statische und bewegte Objekte zu detektieren.
Ziel des Projektseminars war es mithilfe von 3D-Punktwolken die Veränderungsrate von Objekten in Hannover in einer Karte darzustellen. Dazu wurden mehrere Messungen mit dem Mobile Mapping Systems des Instituts für Kartographie und Geoinformatik durchgeführt. Die vollautomatische Segmentierung dynamischer Objekte wurde im Rahmen des Projektes in C++ implementiert. Lediglich die abschließende Darstellung der Ergebnisse in einer Karte erfolgt manuell. In einem Vorverarbeitungsschritt wird die Datenmenge mittels Down-sampling reduziert, sodass eine Punktdichte von 5 cm verbleibt. Des Weiteren ist die Positionierung durch das globale und inertiale Navigationssystem des MSS nicht genau genug, um eine exakte Detektion der Veränderungen zwischen zwei Zeitpunkten zu realisieren. Daher werden zu vergleichende Zeitpunkte dem „Iterativ Closest Point“-Algorithmus relativ zueinander registriert. Der mögliche Fehlereinfluss durch dynamische Objekte bei der Punktzuordnung wird minimiert, indem Korrespondenzen zurückgewiesen werden, wenn sie einen festgelegten Maximalabstand überschreiten. Nach dem Alignment der beiden Punktwolken wird die Bodenebene mittels „Random Sample Consensus“-Algorithmus eliminiert.
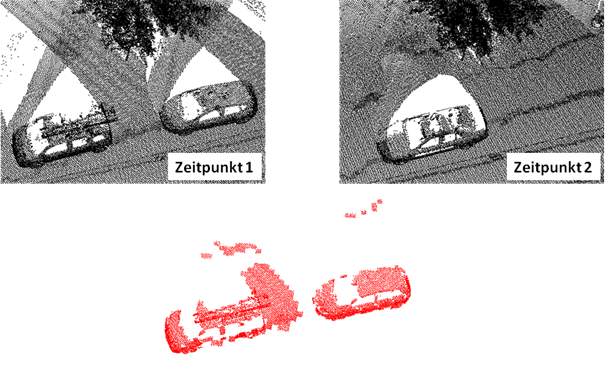
Nach der Vorverarbeitung erfolgt die Veränderungsdetektion anhand eines gridbasierten Ansatzes, der besetzte und unbesetzte Zellen der registrierten Zeitpunkte vergleicht und Unterschiede zwischen zwei Zeitpunkten liefert. Allerdings sind nicht alle Unterschiede dynamische Objekte, sondern können durch den Sichtschatten von Objekten, wie z.B. LKWs, hervorgerufen werden. Um diese zu eliminieren, wird im letzten Schritt eine Verdeckungsanalyse durchgeführt. Zunächst werden hierfür einzelne Objekte mittels Region Growing separiert. Anschließend erfolgt eine Sichtbarkeitsanalyse unter Verwendung von Occupancy Grids der Hindernisse und der verdeckten Punktwolke sowie der Berechnung von Sichtebenen ausgehend von der Trajektorie.
Das Endergebnis ist eine Punktwolke, welche die dynamischen Veränderungen für zwei Zeitpunkte wiedergibt. Dieses wird abschließend in einer Karte präsentiert, in der Gebiete mit großer Dynamik dargestellt werden. Im Rahmen dieses Projektes konnte dabei mit einheitlichen Parametern eine Richtigkeit von 64% realisiert werden.