Junior research group "Automatic methods for the fusion, reduction and consistent combination of complex, heterogeneous geoinformation."
| Led by: | apl. Prof. Claus Brenner |
| Team: | Dr.-Ing. Nora Ripperda, Dr.-Ing. Christoph Dold |
| Year: | 2017 |
| Is Finished: | yes |
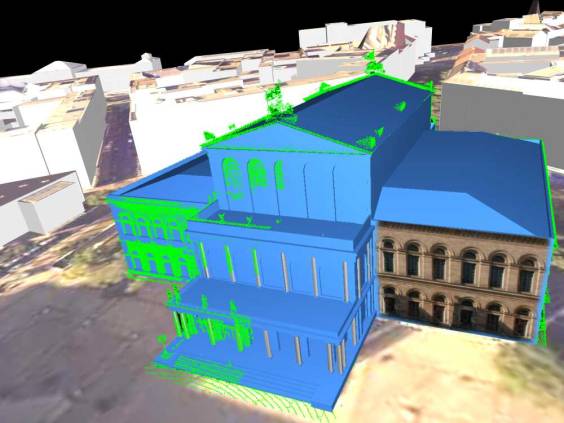
The automated capture of three-dimensional models is a key topic of the junior research group at the ikg. The main focus is on images and laser scan data. Laser scanning is a relatively new technique which allows to measure tens of thousands of points in a matter of seconds. It can be done from the ground (terrestrial scanning) or based on aerial platforms (helicopter, fixed wing aircraft).