Trajectory modeling
| Led by: | Colin Fischer |
| Team: | Sebastian Leise |
| Year: | 2016 |
| Duration: | 2016 |
| Is Finished: | yes |
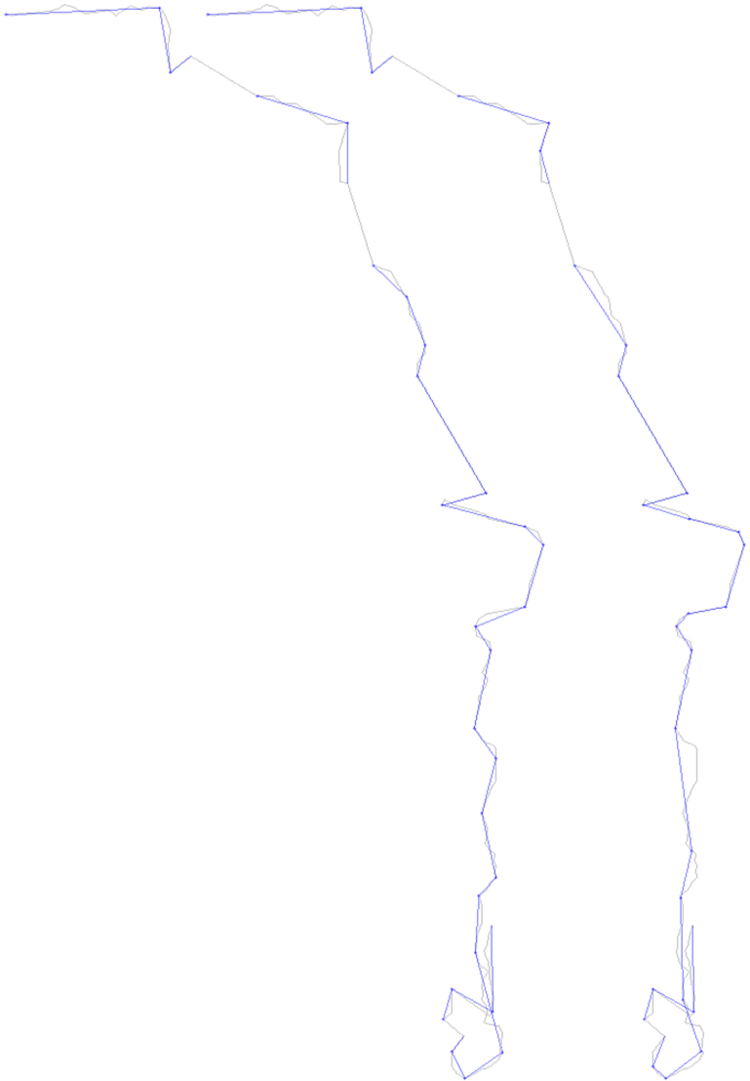
With global navigation satellite systems and their free positioning services, as well as small, low-cost GNSS receivers, it's never been easier to capture and record motion anywhere, anytime. The resulting data volumes can quickly become very large. This makes these records impractical when it comes to storage and evaluation. Approaches to reduce the amount of data while preserving a maximum of spatio-temporal information are required.
Frequently, line generalization algorithms are used which, according to spatial criteria, select a limited number of points which approximately represent the original amount of data. However, for trajectories which also contain time stamps in addition to the spatial information, have a temporal component containing information like when an object was in a specific location and how fast it was at that time.
In this work, several methods are presented that use spatial, temporal, or both components to select points that best describe the trajectory. These algorithms, as well as a way to compare them, have been implemented in Java. Experiments investigate the advantages and disadvantages of different trajectory representations, as well as the effects of sampling rate and desired degree of compression.