Automatische Parametrische Beschreibung von Bodendenkmalen
| Led by: | Frank Thiemann, Monika Sester |
| Team: | Dennis Elschen |
| Year: | 2018 |
| Is Finished: | yes |
Die Untersuchung von Bodendenkmälern liefert wichtige Erkenntnisse zur Entwicklung der Kulturlandschaft in Deutschland. Sie lässt Rückschlüsse über das Leben in vergangenen Epochen und die Veränderung zwischen den Zeitaltern zu. Die Lagebestimmung oder die messtechnische Erfassung der Bodendenkmäler ist nicht immer einfach. Oftmals lassen sich die Objekte schwer erkennen oder befinden sich an schwer zugänglichen Stellen. Airborne Laserscanning eröffnet hierbei eine vergleichsweise neue Methode der archäologischen Prospektion. Aus den erzeugten Laserscannerdaten lassen sich hochauflösende flächendeckende Geländemodelle erzeugen, mit denen auch vorher unentdeckte Bodendenkmäler in Wäldern erkannt werden können. Die auf diese Weise erzeugte Datengrundlage bietet nicht nur neue Möglichkeiten, sondern auch neue Herausforderungen. Durch die hohen Datenmengen stellt sich die Frage nach der Bearbeitungszeit und die damit verbundene hohe Arbeitszeitbelastung. Um diesem Problem zu begegnen, ist es sinnvoll möglichst viele Prozesse zu automatisieren.
Um Bodendenkmäler automatisch mit Methoden zu detektieren, werden die Parameter der gesuchten Objekte benötigt, mit welchen sich die Objekte eindeutig beschreiben lassen. Die manuelle Detektion solcher Objektparameter erfordert einen sehr hohen Aufwand. Außerdem ist es auf Grund von Datenlücken schwer die Parameter der Bodendenkmäler zu detektieren. Eine Lösung wäre diese Lücken mithilfe von passenden parametrischen Modellen zu schließen und die Parameter automatisch anhand der Modellparameter abzuleiten.
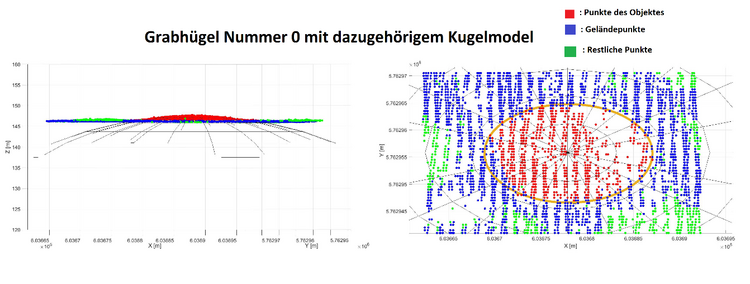
Ziel dieser Arbeit ist es ein Verfahren zu entwickeln, das für die Objekte „Grabhügel“, „Bombentrichter“ und „Köhlermeilerplateaus“ automatisch Parameter ableitet. Dazu sollen, ausgehend von der genäherten Position, einfache parametrische Modelle an die originäre Laserpunktwolke durch Ausgleichung angepasst werden. Die Anpassung und Wahl der parametrischen Modelle spielt eine Schlüsselrolle. Für jedes Objekt, das erfasst werden soll, muss ein parametrisches Modell entwickelt werden, welches die Ermittlung der gesuchten Parameter ermöglicht. Eine Herausforderung ist dabei zum Einen die Individualität der einzelnen Objekte in einer Objektklasse und zum Anderen der hohe Anteil an Punkten, die nicht zu dem Objekt gehören, sich aber in der Punktwolke befinden, die untersucht wird. Es ist aus diesem Grund erforderlich robuste Auswertungsverfahren zu benutzen, um ein zuverlässiges Ergebnis zu erzielen. Die nächste Herausforderung ist das Anpassen des gewählten Ausgleichungsmodells auf die Punktwolke.
Das Ziel ist das parametrische Modell möglichst exakt auf das gesuchte Modell zu legen, um dadurch die Parameter des jeweiligen Objektes abzuleiten. Des Weiteren variiert die Dichte der Laserscanning-Punktwolke je nach Lage des Untersuchungsgebietes aus unterschiedlichen Gründen, was die korrekte Anpassung des Modells zusätzlich erschwert.
Im Rahmen dieser Arbeit, wurden fünf Verfahren implementiert, die unterschiedliche Methoden zur Approximation der Bodendenkmäler umsetzen. Aufgrund der inhomogenen Datenlage wurden einfache parametrische Modelle gewählt, da diese durch die geringere Anzahl an Freiheitsgraden und die festere Form robuster sind als die meisten anderen parametrischen Modelle. Da eine große Fehleranfälligkeit besteht, wenn mehre Bodendenkmäler dicht beieinander liegen, wird dieser Fall durch eine automatische Prüfung auf Überschneidung abgefangen.
Nach der sorgfältigen Evaluation der Methoden und einer Überprüfung ihrer Robustheit durch die Reduzierung der Punktdichte, unterscheidet sich die Qualität der Ergebnisse je nach der Art der Bodendenkmäler.
Während die Approximation der Grabhügel ein zufriedenstellendes Ergebnis liefert, ist es ein Problem bei den Bombentrichtern und Köhlermeilerplateaus, dass diese nicht eindeutig genug sind. Dadurch kann es zu einer fehlerhaften Anpassung der Modelle an die Daten kommen, wodurch im Rahmen dieser Arbeit nicht in allen Fällen ein robustes Ergebnis erzielt werden konnte.