Range and FoV Estimation of Pedestrian Detection in a Helmet Mapping System

| Led by: | Kamalasanan, Busch, Sester |
| Team: | Yisha Li |
| Year: | 2021 |
| Is Finished: | yes |
While LIDAR based mobile mapping systems have been used to map the indoor spaces to create indoor maps, such LIDAR based systems can also be used observe motion information while mapping the environment. This motion information can be used to understand the footfall and useful to businesses and also civil engineers for better planning.
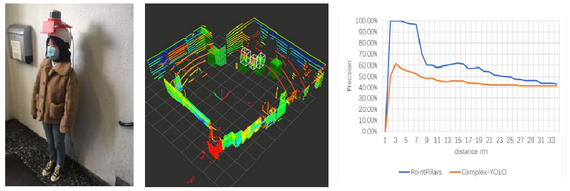
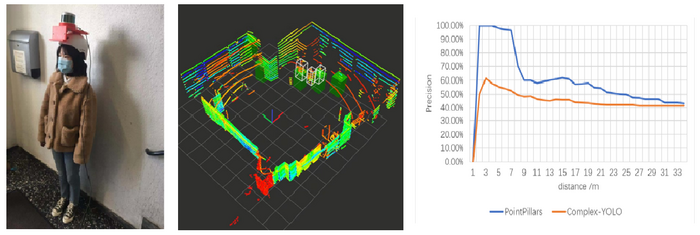
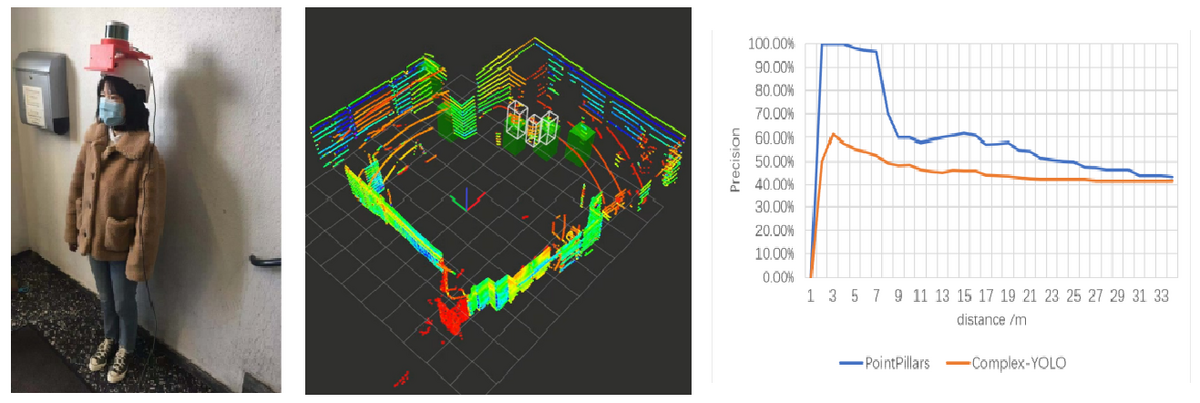
The objective of the work would be to achieve a Helmet mounted mapping system (HMS) using a Velodyne and IMU and its range estimation in detecting dynamic pedestrians. The HMS is an apparatus consisting the Velodyne and IMU mounted on an industry grade Helmet. Two kinds of existing learning methods, the Complex-YOLO with optimized parameters and PointPillars are applied by training a low-resolution simulated KITTI dataset.
The results show the results for 3D pedestrian detection using point pillars , while the results on the right shows the Precision comparison between Pointpillars and Complex Yolo with increasing distance from the Helmet. The results show that higher accuracy corresponds with more points number and as the points number reduced along with distance in x-y plane, the accuracy decrease respectively