Anomalous Pattern Detection from GPS-Trajectories
| Jahr: | 2017 |
| Ist abgeschlossen: | ja |
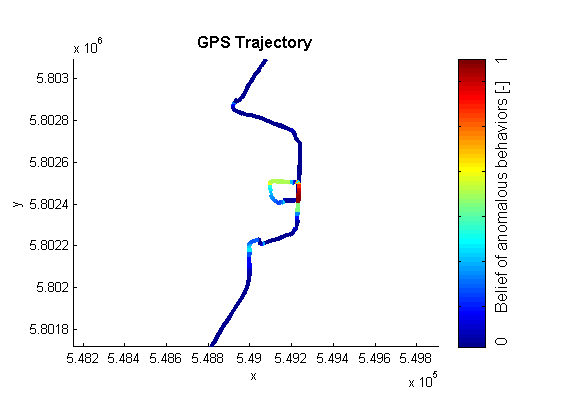
Anomalous pattern detection refers to the problem of finding patterns in data that do not conform to expected behavior. A long-term perspective is taken to extract the required features, which include turns and their density, degree of detour and route repetition, from the trajectory data. We use a high-order Markov chain to remodel the trajectory integrating these long-term features. A recursive Bayesian filter is conducted to process the Markov model and deliver an optimal probability distribution of the potential anomalous driving behaviors dynamically over time. By these means the belief of anomalous behaviors can be inferred dynamically over time. In single trajectory, the result indicates where the driver is likely meeting navigation problem and an assistant is needed. Furthermore, a potential of reflecting traffic issues, e.g., complicated crossings, unexpected blind alleys and temporary road-blocks, is shown as well by analyzing the collective behaviors of multiple trajectories.







