3D Feature Point Extraction from Stereo and Lidar Data
| Team: | Yu Feng |
| Jahr: | 2015 |
| Laufzeit: | 2015 |
| Ist abgeschlossen: | ja |
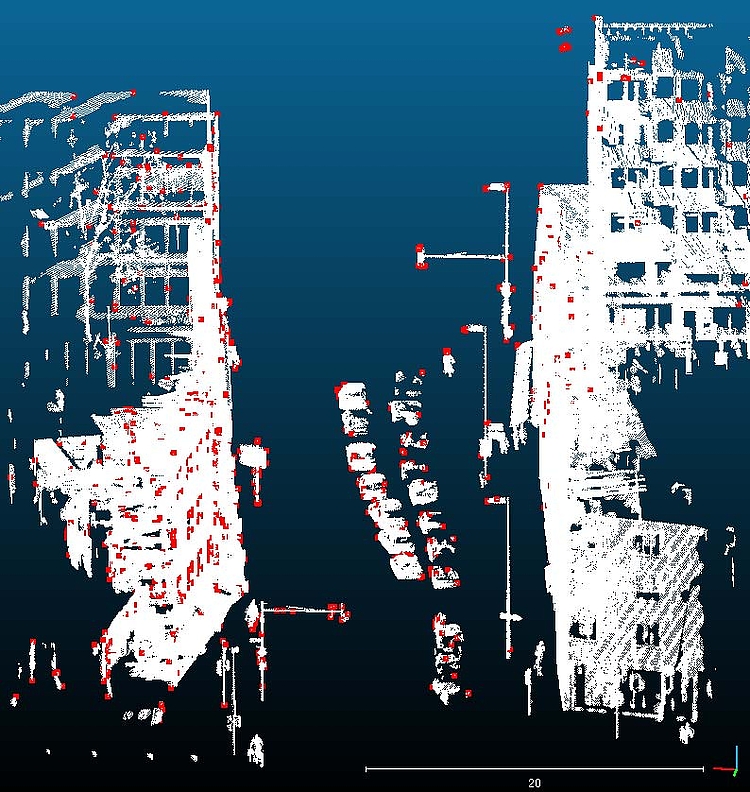
Zur Lokalisierung von (selbstfahrenden) Fahrzeugen können verschiedene Sensoren eingesetzt werden. In dieser Arbeit wurden Methoden untersucht, mit denen korrespondierende 3D-Merkmalspunkte in LiDAR- und Stereokameradaten gefunden werden können. Die besten Ergebnisse lieferte hierbei Algorithmus, der in den Distanzbildern der beiden Sensoren zunächst 2D-Merkmalspunkte detektiert und anschließend mit Hilfe von manuell generierten Trainingsdaten über ein Neuronales Netzwerk lernt, welche Merkmalspunkte geeignet sind. Mit Hilfe dieses Ansatzes konnten für jeweils einen Standpunkt durchschnittlich etwa 20 gemeinsame Punkte in beiden Daten gefunden werden.







