Group formation in shared spaces
| Leitung: | Sester |
| E-Mail: | yao.li@ikg.uni-hannover.de |
| Team: | Li |
| Jahr: | 2020 |
| Förderung: | DFG-Graduiertenkolleg SocialCars |
| Laufzeit: | 2020-2023 |
Group formation in Shared Spaces
"Shared space" is a popular urban design strategy. In general, it decreases the separation between all kind of road users by removing road signs and features (e.g. traffic lights, curbs etc.). The inventors of shared spaces believe that in this way, drivers will pay more attention and slow down when passing through the shared space, with which, the other road users (e.g. pedestrians and cyclists) gain more priority.
However, while the concept is attractive and implemented all over the world, there are also safety issues raised: in the UK, a serious accident happened, when a blind man tried to pass through a shared space, a van crushed on him and unfortunately he died. Later, a survey on how people feel about using shared spaces was launched. The feedback was relatively negative. Pedestrians and cyclists reported that they felt they were bullied by vehicles, meanwhile, from the driver's side, it‘s hard to estimate what other road users do when there are no traffic signs.
Besides safety aspects, current shared spaces have efficiency problems as well. When the traffic flow is quite high, it shows a bottleneck effect, as there is no coordination.
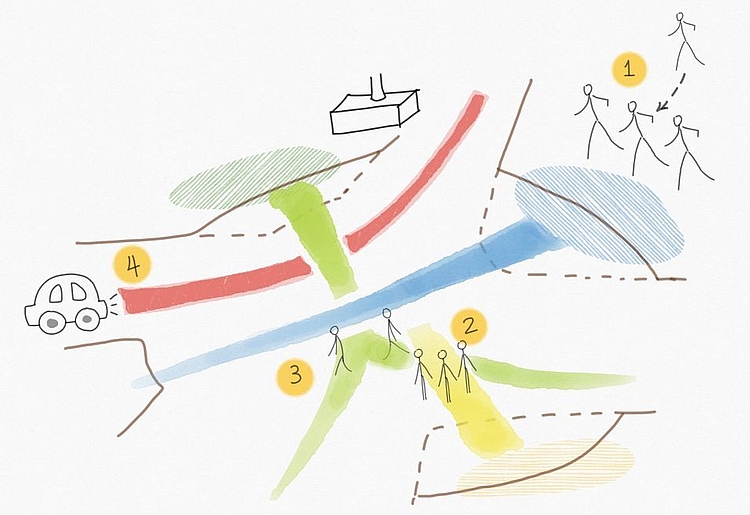
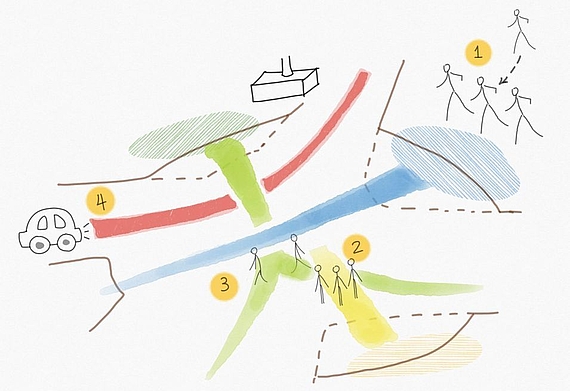
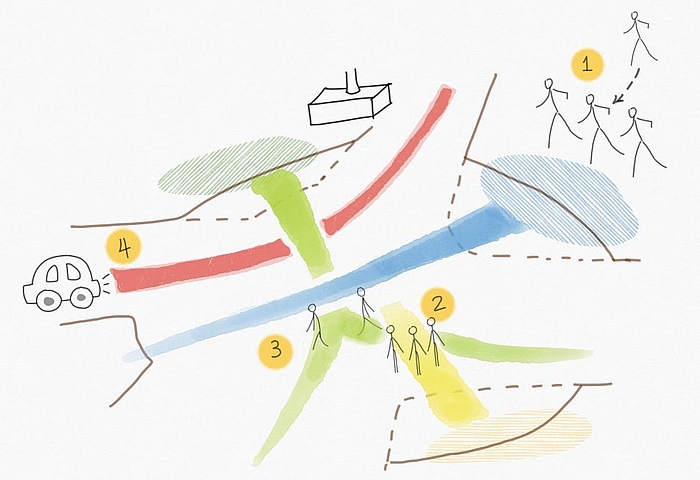
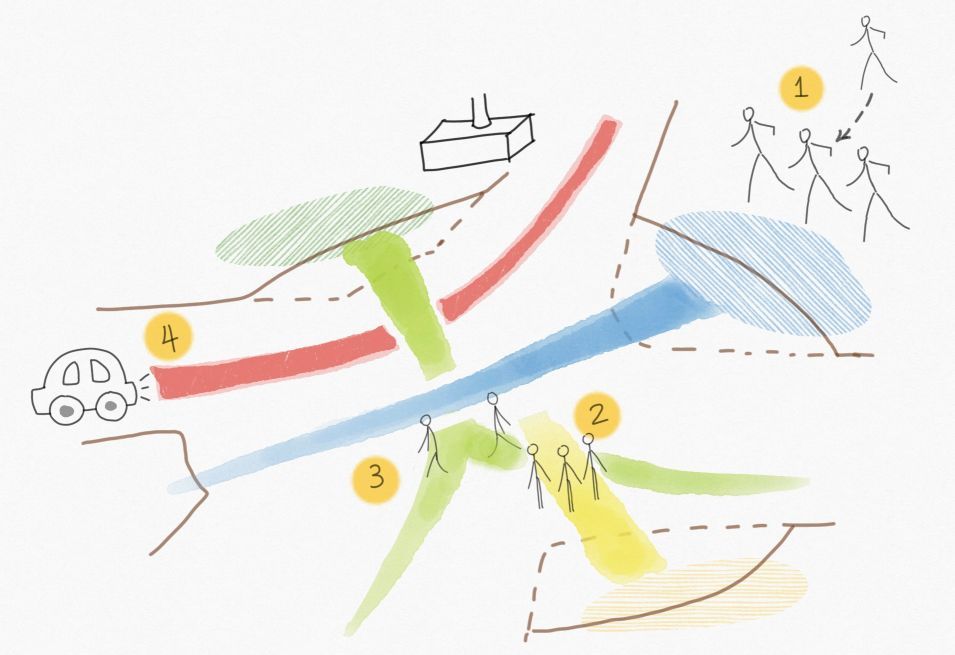
To solve these problem, we come up with the following hypothesis, which is illustrated by the figure above: by grouping traffic participants when they crossing, the safety and efficiency will increase. This is intuitive because when pedestrians become a group, they will gain more priority compared with individuals (case 4 & 3 in the figure). What‘s more, grouping will decrease the number of ifferent traffic participants, therefore, it's easier to manage how all participants pass the shared space (case 1) and consequently, the traffic flow will be more fluent.
The project will concentrate on two parts: online multi-agent path planning and collaborative traffic management. State-of-art methods, like multi-agent reinforcement learning, graph search and other algorithms will be used to figure out the best way for several groups of traffic participates to pass through a shared space.







