Large scale mobile mapping and change detection
| Leitung: | Brenner, Schachtschneider, Schlichting |
| Team: | Adeolu Eribake, Ahmed Al-Taan, Anit Salgotra, Hasan Sharifi, Mirjana Voelsen |
| Jahr: | 2018 |
| Ist abgeschlossen: | ja |
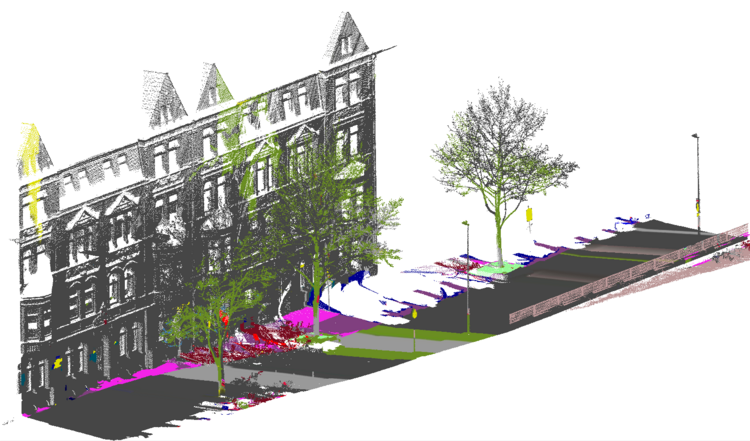
Aufgabe des Projektseminars mit dem Titel „Large scale Mobile Mapping change detection“ war die Extraktion dynamischer Objekte, wie Fahrzeuge oder Fußgänger, aus Laserscanning-Daten eines Mobile-Mapping-Systems (siehe Abbildung 1). Zur Detektion der Dynamiken wurden zwei Ansätze gewählt: eine Änderungsdetektion sowie die Klassifizierung durch Verfahren des maschinellen Lernens.
Im Falle der Änderungsdetektion werden zwei Punktwolken desselben Gebietes aus unterschiedlichen Messkampagnen miteinander verglichen. Statische Objekte zeichnen sich dadurch aus, dass innerhalb eines bestimmten Radius korrespondierende Punkte in beiden Datensätzen gefunden werden können. Kann für einen Punkt kein korrespondierender Punkt im jeweils anderen Datensatz gefunden werden, so wird dieser als dynamisch markiert.
Zur Detektion dynamischer Objekte durch eine Klassifizierung wird zunächst eine Segmentierung freistehender Objekte in den Punktwolken durchgeführt. Anschließend werden für jedes Objekt Merkmale bestimmt, welche im folgenden Klassifizierungsschritt verwendet werden. Diese Merkmale enthalten neben geometrischen Größen auch die Ergebnisse einer semantischen Klassifizierung der Bilder, welche zeitgleich zu den Laserscanning-Messungen durch Kameras des Mobile-Mapping-Systems aufgenommen und auf die Punktwolken projiziert wurden. Die Einteilung der Objekte nach den Klassen dynamisch und statisch geschieht durch einen Random-Forest-Klassifizierer, ein bekanntes Verfahren aus dem Maschinellen Lernen. Durch dieses Verfahren konnten 89 % aller dynamischen Objekte detektiert werden. Abbildung 2 zeigt eine Punktwolke nach Anwendung der Klassifizierung und Extraktion der resultierenden dynamischen Objekte.
Als Ergebnis aus beiden Verfahren ist jeweils eine Referenzkarte entstanden, welche lediglich statische Objekte enthält und beispielsweise im Kontext des autonomen Fahrens verwendet werden kann.







