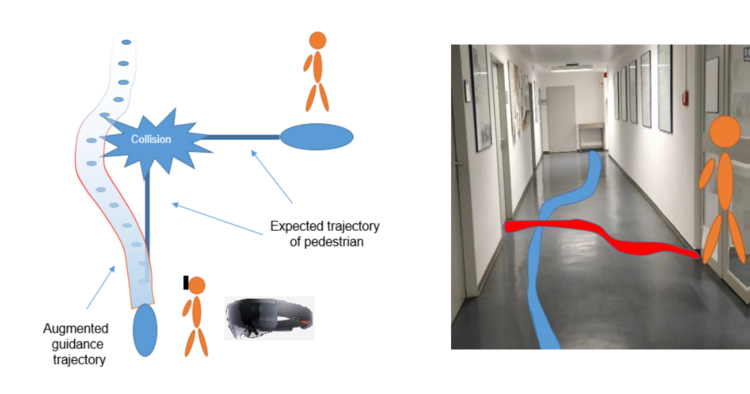
Controlling pedestrian motion using Augmented Reality
| Leitung: | Sester |
| Team: | Kamalasanan, Vinu |
| Jahr: | 2020 |
| Förderung: | DAAD - im Rahmen des GRK SocialCars |
| Laufzeit: | 2020-2024 |
Veröffentlichungen zum Projekt
(2020):
Behaviour control with augmented reality systems for shared spaces,
The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 43, 591-598.
DOI: 10.5194/isprs-archives-XLIII-B4-2020-591-2020
DOI: 10.5194/isprs-archives-XLIII-B4-2020-591-2020







