Incremental Map Refinement
| Leitung: | Sester, Monika |
| Team: | Zou, Qianqian |
| Jahr: | 2020 |
| Förderung: | DFG-Graduiertenkolleg i.c.sens |
| Laufzeit: | 2016-2024 |
Short description
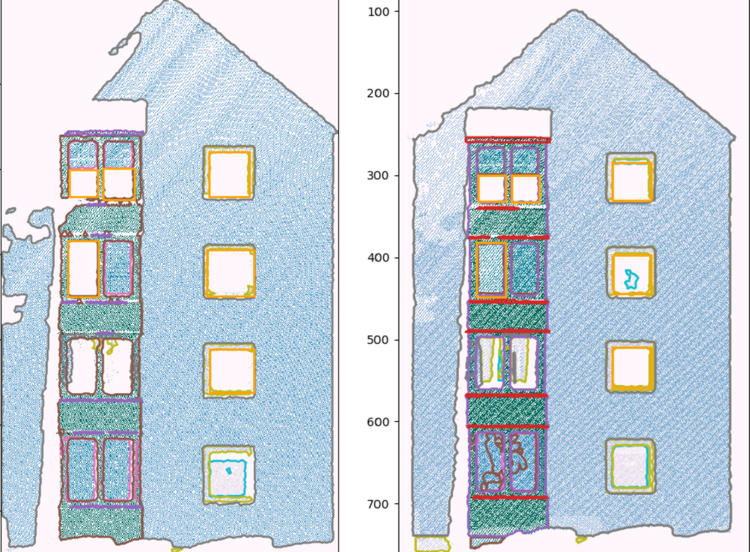
For autonomous systems, an accurate and precise map of the environment is of importance. Mapping from LiDAR point clouds is one of the promising ways to generate 3D environment models. However, there are many problems caused by inaccurate data, missing areas, low density of points and sensor noise. Also, it is often not possible or accurate enough to generate a map from only one measurement campaign. The idea of the project is to incrementally refine the map by several measurements from different campaigns and represent the map in a hierarchical way with a measure indicating uncertainty and the level of detail for objects. The idea is thus to store all captured information with a tentative semantics and uncertainty – even when it is not yet complete. Hence, occulated areas are presented as well, which can be possibly improved by the supplemental observation from the next measurement campaign. The proposed 3D environment model framework and the incremental update method are evaluated using LiDAR scans obtained from Riegl Mobile Mapping System.
Veröffentlichungen zum Projekt
DOI: 10.1109/LRA.2023.3303694
ISSN: 23773766
DOI: doi: 10.1109/LRA.2024.3475873







