Erstellung dynamischer Karten durch kooperative Fahrzeuge
| Team: | Busch, Brenner |
| Jahr: | 2017 |
| Förderung: | Deutsche Forschungsgemeinschaft (DFG) |
Inhalt
Bereits heute sind viele Fahrzeuge mit Sensoren versehen, wodurch eine sehr große Menge sensorieller Daten über den Straßenraum zur Verfügung steht. Bisher werden diese Sensordaten nur individuell von jedem Fahrzeug ausgewertet. Beispielsweise werten Assistenzsysteme die Lage aus und leiten daraus ihr unmittelbares Verhalten (z.B. Notbremsung) ab. Das abgeleitete Wissen steht jedoch anderen Verkehrsteilnehmern nicht zur Verfügung. Dies hat den Nachteil, dass ein Aufbau von Wissen, beispielsweise über gefahrenträchtige Orte, nicht stattfindet.
In Zukunft wird die Vernetzung von Fahrzeugen eine immer größere Rolle spielen. Dadurch wird es möglich, dass Fahrzeuge ihre Informationen weitergeben, welche anschließend auf einem Server zu einem Lagebild aggregiert werden. Hierbei handelt es sich nicht nur um die bekannte „Verkehrslage“, sondern darüber hinaus um Informationen zum Aufbau und Zustand des Verkehrsraums, der Bewegungsmuster anderer Verkehrsteilnehmer und typischer Gefahrenquellen. Diese georeferenziert vorliegenden Informationen können wiederum von den teilnehmenden Fahrzeugen verwendet werden, um ein entsprechend angepasstes Verhalten einzustellen. Beispielsweise kann aus den Beobachtungen vieler Fahrzeuge abgeleitet werden, dass eine Verkehrsfläche konkurrierend von Fußgängern und Fahrzeugen benutzt wird. Aufgrund dieser Information kann ein Fahrzeug sein Verhalten modifizieren, etwa durch eine Geschwindigkeitsreduktion und eine erhöhte Bremsbereitschaft.
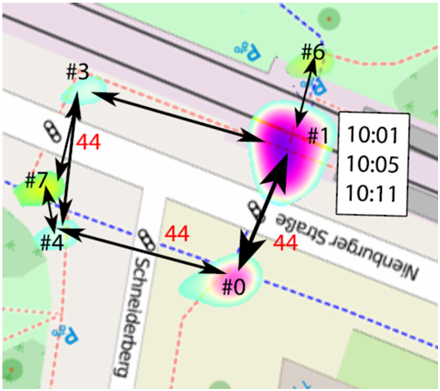
Ziel des Projekts ist die Entwicklung von Algorithmen, die aus den Informationen von vielen Fahrzeugen, welche über einen längeren Zeitraum gewonnen wurden, konsistente Modelle des Verkehrsraums (Fahrstreifen, Abbiegemöglichkeiten, Haltelinien) und der typischen Bewegungsmuster der Verkehrsteilnehmer ableiten. Hierzu sollen die Eigenlokalisierung der Fahrzeuge sowie die Beobachtung anderer Fahrzeuge über Bildsensoren verwendet werden.







