Investigation of Maximum Consensus Techniques for Robust Localization
| Leitung: | Axmann, Brenner |
| Team: | Yimin Zhang |
| Jahr: | 2021 |
| Ist abgeschlossen: | ja |
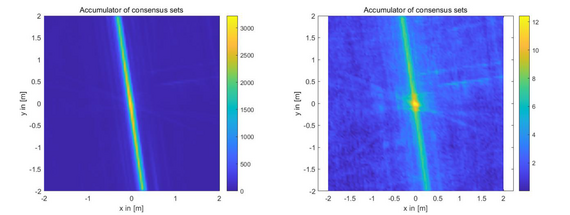
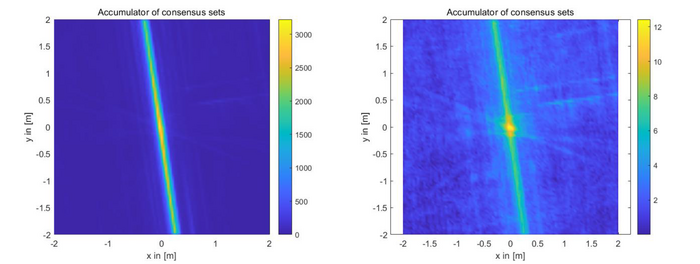
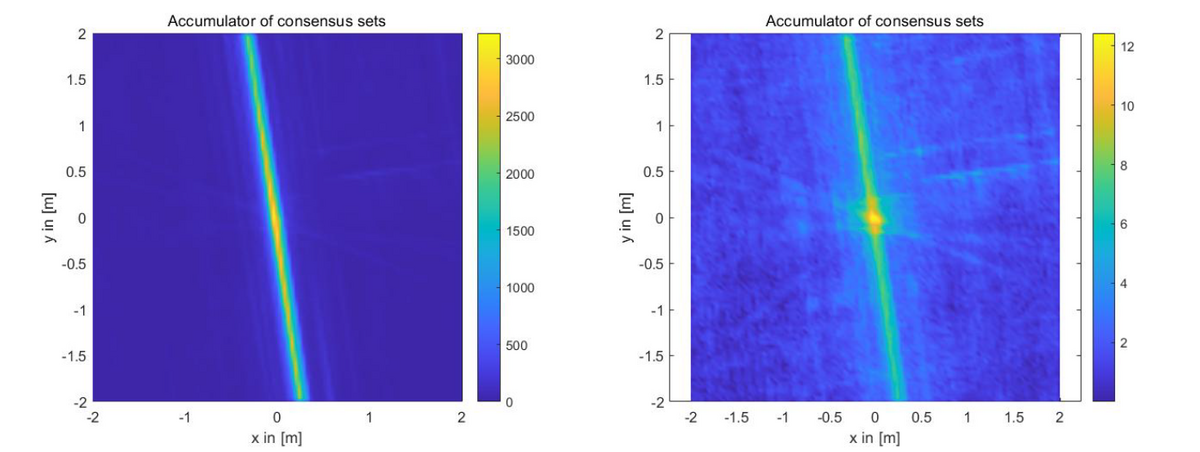
High integrity localization is a fundamental task for an autonomous driving system. Standard localization approaches are usually accomplished by point cloud registration, which is often based on (recursive) least squares estimation, for example, using Kalman filters. However, due to the susceptibility of least squares minimization to outliers, it is not robust. This thesis focuses on robust localization and aims at the investigation of maximum consensus techniques using LiDAR data. The state-of-the-art maximum consensus approach is evaluated from various perspectives and its shortcomings with respect to straight street scenarios are revealed. Against that, a methodologically optimized normal vector based formulation of maximum consensus is proposed, which uses the distribution of the normal vectors to formulate the accumulator of consensus sets. With doing so, the system is able to achieve a robust localization on all common road conditions. The performances of both approaches are tested and analyzed on a data set containing 1915 epochs. The influence of search parameters is examined with respect to localization accuracy and run time. Results show a considerable improvement of the robustness using the normal vector based formulation (cf. second figure).
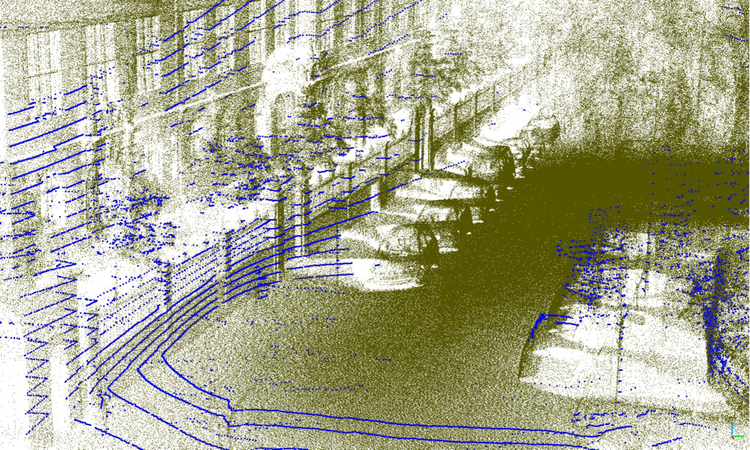
The first figure on top of the page visualizes point clouds for the localization task (brown: map point cloud, blue: car sensor point cloud), while the second figure shows a comparison of maximum consensus accumulators for the same epoch (left: point based approach, right: normal vector based approach).







