Transformation of Point Clouds using Generative Adversarial Networks
| E-Mail: | florian.politz@ikg.uni-hannover.de |
| Team: | Politz, Sester |
| Jahr: | 2020 |
| Ist abgeschlossen: | ja |
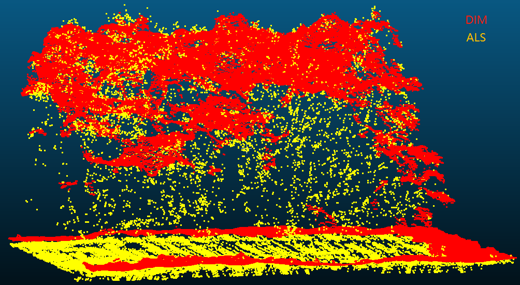
There are currently two most common types of point clouds in the cartography field. One is acquired from airborne laser scanning (ALS) and the other is obtained from the dense image matching algorithm (DIM), which are derived from aerial images. The ALS point cloud has a higher position accuracy and has points in the middle and at the bottom of vegetation because of the laser's penetration. Comparatively, the DIM point cloud only has points on the top of vegetation. The DIM also has its advantages such as containing colour information and a higher point density, but with lower point accuracy. However, established processing software is only optimized for ALS point clouds.
The purpose of this work is to convert DIM point clouds to ALS-like point clouds, which have a more similar geometrical behavior as ALS point clouds; f.e. containing bottom points for vegetation. Ultimately, the thesis tried to improve the performance of transformed point clouds in regard to registration and classification tasks. To achieve this goal, a Generative Adversarial Network (GAN) is trained on rasterized height distribution image pairs (DIM-ALS) of the point clouds. The trained generator is able to predict new height distribution images, which are utilized to distort the DIM point cloud to the ALS-like point cloud. These point clouds are used as a temporary replacement of the original DIM point cloud.
The final results show that the transformed point cloud's performance in registration and classification is improved in most cases, especially for vegetation areas. However, there are still some problems remaining. For example, buildings and bridges with vegetation-like height distributions are still problematic as they are wrongly distorted and as such decrease to vegetation. Hence, there is still room for future work.







