Indoor Navigation
| Leitung: | Paelke |
| Team: | Fokko Krebs |
| Jahr: | 2009 |
| Laufzeit: | 2009 |
| Ist abgeschlossen: | ja |
Sich in einem fremden Gebäude zu orientieren kann problematisch sein. Noch wichtiger ist es jedoch, dass in einem Notfall die Leute sicher aus dem Gebäude geleitet werden und sich Rettungskräfte schnell und effizient in diesen auch unter widrigen Umständen bewegen können. Hier setzen Systeme für die Indoornavigation an, die als handliche Helfer, z.B. in einem Mobiltelefon untergebracht, diese Aufgabe erfüllen können. Weitere Einsatzbereiche sind Museen und andere Freizeiteinrichtungen. Klassische GPS gestützte Navigationssysteme sind zur Navigation in Gebäuden ungeeignet, da keine direkte Sichtverbindung zum Satelliten besteht und die Signalreflektionen zu großen Ungenauigkeiten führen. Darüber hinaus stehen in der Regel keine routingfähigen Gebäudedaten zur Verfügung.
Ziel der Arbeit war die Entwicklung eines funktionsfähigen Indoor-Navigationssytems, dass auf aktuellen Mobiltelefonen unter Java ME lauffähig ist.
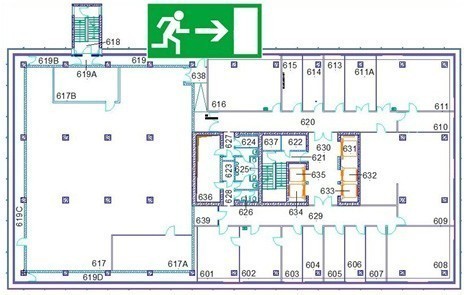
Konkret umgesetzt wurde die Routing und Navigationssfunktionalität am Beispiel des IKG.
Zur Lokalisierung werden optische Marker eingesetzt. Damit ist über die Kamera des Mobiltelefons eine exakte Feststellung der Position (und Orientierung) des Nutzers möglich.
Die IndoorNavigation stellt besondere Anforderungen an die Genauigkeit und Benutzbarkeit. Es müssen Genauigkeiten im Raum- und Etagenbereich gegeben sein.
Funkbasierten Ortungssyteme können bestehende Infrastrukturen wie Wireless LAN Netze oder Bluetooth ad hoc Netzwerke nutzen, die über keine ausreichende Genauigkeit verfügen. Eine Verbesserung der Genauigkeit kann durch zellulare Ortungssysteme erreicht werden.
Bei der markergestützten Ortung handelt es sich um ein passives System, bei dem Informationen aus Markern ausgelesen werden, die sichtbar oder unsichtbar im Gebäude verteilt sind.
Dies können optische Marker sein, wie gedruckte zweidimensionale Codes oder elektronische Marker, wie RFID Chips.
Zur Zielführung muss für das zu betrachtende Gebäude eine Wegalgebra entwickelt werden. Diese basiert auf einen gerichteten Graphen mit Kantengewichten. In diesem lassen sich die kürzesten Wege nach dem Dijkstra Algorithmus berechnen.
Im Rahmen der Masterarbeit wurde ein Prototyp mit der objektorientierten Programmiersprache Java Micro Edition erstellt. Ein Vorteil der Programmiersprache ist es, dass sie portabel ist, was bedeutet, dass ein Programm auf verschiedenen mobilen Geräten wie PDAs und Mobiltelefonen ausführbar ist. Es benutzt zur Positionsbestimmung des Nutzers zweidimensionale Codes.v
Der Prototyp wurde in einem Feldversuch erfolgreich getestet und mit Fragebögen evaluiert.







