"Leibniznavigator"
| Leitung: | Brenner, Czioska, Feuerhake, Hofmann, Kuntzsch, Schlichting |
| Team: | Sercan Çakır, Frederic Hake, Lukas Hynek, Simone Görler, Richu Mary Shelly, Oskar Wage |
| Jahr: | 2017 |
| Ist abgeschlossen: | ja |
Gerade für Erstsemester und Gäste der Leibniz Universität Hannover ist es am Anfang schwierig, sich in den Gebäuden der Universität zu orientieren und den gewünschten Raum zu finden. In anderen Universitäten und Hochschulen, z.B. in Augsburg oder Karlsruhe, wurden zu diesem Zweck Applikationen zur Navigation auf dem Campus und teilweise auch innerhalb der Gebäude entwickelt.
Für die Leibniz Universität Hannover sollte nun im Rahmen des Projektseminars eine App zur Indoor- und Outdoornavigation entwickelt werden, den Leibniz Navigator. Dazu sollten jeweils unterschiedliche Methoden zur Lokalisierung und Navigation evaluiert und auf ihre Umsetzbarkeit geprüft werden. Abgesehen von diesem groben Rahmen wurde den Studierenden die Planung und Umsetzung der konkreten Details überlassen.
Es wurde entschieden, die App für Endgeräte mit einem Android-Betriebssystem ab Version 4.1 zu entwickeln. Kartengrundlage sind Open-StreetMap-Daten (OSM) und Flurpläne, die automatisiert aus Gebäudeplänen der Universität erstellt und generalisiert wurden. Im Rahmen des Projektseminars wurden die Flurpläne des Hauptgebäudes sowie der für Geodäten wichtigen Gebäude und Geschosse in die App integriert.
Zur Positionierung werden im Outdoor-Bereich GPS-Signale genutzt. Als Indoor-Positionie-rungsmethode wurden QR-Codes gewählt, die an die Raumschilder angebracht werden und Informationen zu Raumnummer und Geschoss enthalten. Scant ein Nutzer den nächst-gelegenen Code, ist seine Position türgenau bekannt. Alternativ ist auch eine manuelle Eingabe der Raumnummer möglich. Zusätzlich wurden Verfahren zur die Indoor-Positionierung mittels Beschleunigungssensor und Gyroskop des Smartphones und Bilddeskriptoren, z.B. SIFT, getestet.
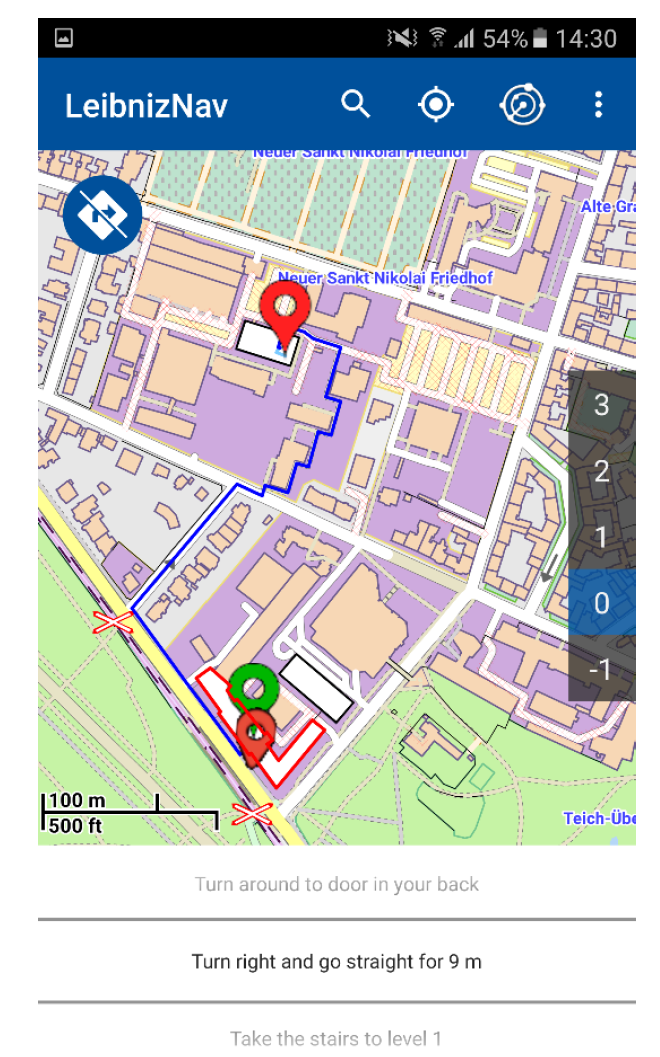
Zur Eingabe eines Ziels kann entweder die Suche genutzt werden oder der nächste Point of Interest, wie die nächste Toilette, Cafeteria oder Haltestelle, angezeigt werden. Außerdem wurde ein Kalender mit Veranstaltungen an der Leibniz Universität integriert, die Räume können direkt als Ziel ausgewählt werden.
Nach der Eingabe von Ziel und aktueller Position wird die kürzeste Route angezeigt. Diese wird mittels Dijkstra-Algorithmus auf Grundlage eines Routinggraphen, abgeleitet aus den Flurplänen und OSM-Daten, berechnet. Die Routenbeschreibung für die Navigation wird automatisch aus der Routengeometrie erstellt.
Bei der Outdoornavigation erfolgt ein online Map Matching basierend auf dem Viterbi-Algorithmus. Dadurch kann detektiert werden, ob der Benutzer entlang der vorgeschlagenen Route läuft. Ist dies nicht der Fall, kann eine neue Route berechnet werden.
Eine Internetverbindung wird lediglich zur Aktualisierung der Datenbank benötigt, bei der zum Beispiel Gebäude hinzugefügt oder Wege gesperrt werden, die zeitweise nicht begehbar sind. Die Detektion gesperrter Wege erfolgt automatisch mit Hilfe von Offline Map Matching und einem Vergleich des tatsächlich genutzten Weges mit der berechneten Route.
Die App kann von unserer Website leibniznav.ikg.uni-hannover.de heruntergeladen werden.







