Prediction of behaviour and its storage in maps
| Leitung: | Sester, Monika |
| Team: | Xu, Yiming |
| Jahr: | 2025 |
| Datum: | 19-03-23 |
| Förderung: | DFG Graduiertenkolleg i.c.sens |
| Laufzeit: | 2022-2024 |
Prediction of behavour and storage in maps
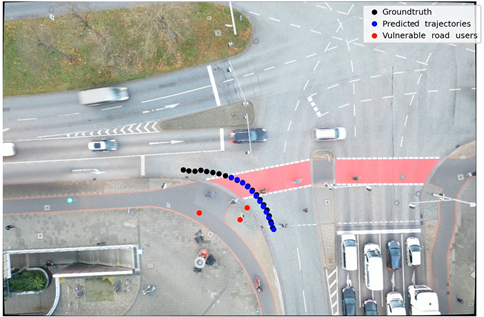
In this dissertation project, the behavior of objects and phenomena in the environment will be detected and stored in maps. Such information can be integrated into localization models and thus increase the integrity of the system. The project will investigate how behavior can be observed and classified, and how it can be viewed in a spatio-temporal context in particular. Neural networks, especially LSTM or Variational Autoencoders (VAE) are suitable for this purpose. In particular, it is also a matter of transferring the properties determined from concrete instances to classes of objects or areas. The result of the behavior classification shall be represented in digital maps, where a hybrid representation (occupancy grid plus vector representation) seems to be suitable to represent the spatial uncertainty.
Furthermore, it will be investigated how the neural network model can be directly integrated into the map to derive the most probable prediction for the dynamic objects from a given detected situation. The project requires data from the mapathons in which the behavior of road users is determined and thus directly relates to work on trajectory determination.
Veröffentlichungen zum Projekt
DOI: 10.1109/IV55156.2024.10588486







