Bachelorarbeiten (abgeschlossen)
-
Klassifikation von Mobile Mapping LiDAR PunktwolkenIn vielen Anwendungsgebieten der Geodäsie, beispielsweise dem des autonomen Fahrens, gewinnt die automatische Erkennung von Objekten in (urbanen) Regionen an Relevanz. Eingesetzt werden dafür verschiedene Aufnahmesysteme, dessen Daten in Echtzeit analysiert werden müssen. Besonders gut geeignet sind dafür Light Detection and Ranging (LiDAR) Punktwolken. In dieser Arbeit wird die Klassifikation von LiDAR Punktwolken verschiedener Methoden analysiert und bewertet. Als Datengrundlage dienten Scanstreifen aus einer Messkampagne des Instituts für Kartographie und Geoinformatik der Leibniz Universität Hannover. Mit Hilfe der Klassifikatoren Random Forests und Support Vector Machines konnten die einzelnen LiDAR Punkte 16 verschiedenen Klassen zugeordnet werden.Leitung: Brenner, SchachtschneiderTeam:Jahr: 2020
![]()
![]()


Masterarbeiten (abgeschlossen)
-
Investigation of Maximum Consensus Techniques for Robust LocalizationHigh integrity localization is a fundamental task for an autonomous driving system. Standard localization approaches are usually accomplished by point cloud registration, which is often based on (recursive) least squares estimation, for example, using Kalman filters. However, due to the susceptibility of least squares minimization to outliers, it is not robust. This thesis focuses on robust localization and aims at the investigation of maximum consensus techniques using LiDAR data. The state-of-the-art maximum consensus approach is evaluated from various perspectives and its shortcomings with respect to straight street scenarios are revealed. Against that, a methodologically optimized normal vector based formulation of maximum consensus is proposed, which uses the distribution of the normal vectors to formulate the accumulator of consensus sets. With doing so, the system is able to achieve a robust localization on all common road conditions. The performances of both approaches are tested and analyzed on a data set containing 1915 epochs. The influence of search parameters is examined with respect to localization accuracy and run time. Results show a considerable improvement of the robustness using the normal vector based formulation.Leitung: Axmann, BrennerTeam:Jahr: 2021
![]()
![]()
-
Using Dynamic Objects for Probabilistic Multi-View Point Cloud Registration and LocalizationRegistering two point clouds involves finding the optimal rigid transformation that aligns those two point clouds. For a connected autonomous vehicle (CAV), an accurate localization for an `ego’ vehicle can be achieved by registering its point cloud to LiDAR data from other connected `cooperative’ vehicles. This paper utilizes an advanced object detection algorithm to select observation points that are on detected vehicles. As a prerequisite, a general probability distribution (cf. left figure) based on the observation points from all detected vehicles is established. For the registration, in the first step, observation points from a cooperative vehicle are assigned to detected bounding boxes. Then, each set of points belonging to one bounding box is registered to the general probability distribution resulting in a `probability map’. In the second step, the probability map is used as shared information and the point cloud of the ego vehicle is registered to it. Different from the Euclidean distance metric of the Iterative Closest Point (ICP) algorithm and the consensus count metric of the maximum consensus method, a new probability-related metric is proposed for a coarse registration. It is used to provide an initial transformation, which is used afterwards in a registration refinement by ICP. The registration is completely based on the vehicle information in the scene. The algorithm is evaluated on the collective perception data set COMAP. Especially for some scenes that are challenging to existing registration algorithms such as scenes in a traffic jam or in an open space where no efficient overlaps of observed static objects exists. For those scenarios, from the perspective of accuracy and robustness, the algorithm has shown good performance. The left figure shows the general distribution of observation points, while the figure on the right shows the registration result between 'probability map' of cooperative vehicle and Lidar points of ego vehicle.Leitung: Brenner, Yuan, AxmannTeam:Jahr: 2021
![]()
![]()
-
Kalibrierung von Crowd Sourced Messungen der Oberflächenrauigkeit mittels LiDAR DatenSmartphones als kompakte Multisensorplattformen ermöglichen es zum Beispiel beim Fahrradfahren die Oberflächenrauigkeit anhand von Positions- und Beschleunigungsmessungen zu erfassen und Aussagen über die Qualität des Untergrundes zu treffen. Die erfassten Beschleunigungen des am Fahrradlenkers befestigten Smartphones können allerdings ebenso durch den Luftdruck der Reifen, das Gewicht des Fahrers oder die gefahrene Geschwindigkeit beeinflusst werden, sodass sich die von verschiedenen Personen erfassten Daten nicht direkt miteinander vergleichen lassen. In der Arbeit wurde die Eignung von LiDAR Mobile Mapping Punktwolken als unabhängige Referenz für die Erfassung von Oberflächenrauigkeiten und die Modellierung möglicher Einflussgrößen untersucht. Grundlage der Untersuchung dieser Arbeit sind LiDAR Mobile Mapping Punktwolken eines Messgebietes im Georgengarten, für das zusätzlich Beschleunigungs- und GPS-Beobachtungen von 17 Testpersonen zur Verfügung gestellt wurden.Leitung: Feuerhake, Wage, BrennerTeam:Jahr: 2021
![]()
![]() © L. Peter
© L. Peter
-
Optimale Zuordnung von Punktwolken mittels Deep LearningIn dieser Arbeit wurde untersucht, ob sich luftgestützte 3D Punktwolken unterschiedlicher Herkunft registrieren lassen. Bei den Punktwolken handelt es sich um Punktwolken, die aus Airborne Laser Scanning (ALS) und aus Dense Image Matching (DIM) abgeleitet wurden. Sie enthalten zwar dieselbe Oberfläche, besitzen jedoch unterschiedliche Eigenschaften. Dabei stellt vor allem Vegetation ein Problem dar. In ALS kann diese durchdrungen werden, wodurch ALS Punktwolken sowohl die Vegetation als auch den darunterliegenden Boden enthält.Leitung: Brenner, PolitzTeam:Jahr: 2019
![]()
![]()
-
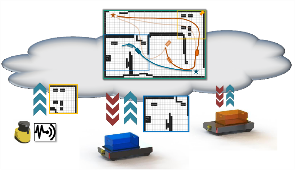
Development of a Client-Server Module for Cooperative Multi-Robot Longterm Map RegistrationNowadays a big amount of robots are used in production and logistic. Due to the large working environment, dynamic objects (e.g. humans or other robots), and semi-static objects (e.g.machine and furniture), a high performance navigation system is required. But only focus on the high performance long term SLAM on single robot is not enough to guarantee the flexible and accurate performance of whole robot fleet in large changing environment.Leitung: Tobias Ortmaier (IMES), Claus Brenner, Steffen Busch (IKG), Philipp Schnattinger (FraunhoferIPA)Team:Jahr: 2019
![]()
![]()
-
Klassifizieren und Detektieren von Verkehrsteilnehmern mittels Neuronalen Netzen und Active Shape ModellenAutonome Fahrzeuge interpretieren ihre Umgebung auf Grundlage ihrer Sensordaten. 360° Laserscanner bieten dabei umfassende und hoch genau Informationen über die Entfernung von Objekten. Die Vorhersage des Verhaltens von Verkehrsteilnehmern unterscheidet sich zwischen PKW, LKW/Bussen, Radfahrern und Fußgängern. Die exakte Position der verschiedenen Verkehrsteilnehmer ist dabei abhängig von ihrer Ausrichtung und ihren geometrischen Ausmaßen. Active Shape Modelle bieten die Möglichkeit den Mittelpunkt der Objekte durch die Schätzung von deformierbaren Modellen, auf der Basis von CAD-Plänen und unter Berücksichtigung ihrer Ausrichtung, zu schätzen.Leitung: Bodo Rosenhahn (TNT), Claus Brenner, Steffen Busch (IKG)Team:Jahr: 2019
![]()
![]()
-
Laserscanner-basierte Prädiktion von Passantenbewegungen durch Filterung und Klassifikation der KörperhaltungVor dem Hintergrund der Sicherheit im Straßenverkehr wird im Folgenden ein Algorithmus vorgestellt, der auf Basis von Punktwolken eine möglichst genaue Vorhersage über die zukünftige Position von Fußgängern trifft. Ein Kernelement ist dabei den aktuellen Bewegungszustand der Fußgänger über einen Random Forest zu klassieren. Dabei steht vor allem eine frühe Detektion von Wechseln zwischen einzelnen Zuständen im Fokus.Leitung: Claus Brenner, Steffen BuschTeam:Jahr: 2019
![]()
![]()
-
Klassifikation und Änderungsdetektion in Mobile Mapping LiDAR Punktwolken3D-Modelle der statischen Umgebung zu erstellen ist eine wichtige Aufgabe für das Voranbringen von Fahrerassistenzsystemen und dem autonomen Fahren. Hierzu stehen in dieser Arbeit Mobile Mapping LiDAR Punktwolken aus 14 Messepochen zur Verfügung, die mithilfe eines Voxel Grids zu einer Referenzkarte weiterverarbeitet werden. Ein Voxel Grid ist eine Datenstruktur, die den realen Raum in volumenhafte Elemente unterteilt und die Punktdichte der Punktwolken reduziert. Zusätzlich werden Daten aus einer Strahlverfolgung bereitgestellt, sodass zwischen durchschossenen und unbekannten Voxeln unterschieden werden kann, wodurch sich Verdeckungen erkennen lassen.Leitung: Brenner, SchachtschneiderTeam:Jahr: 2019
![]()
![]()
-
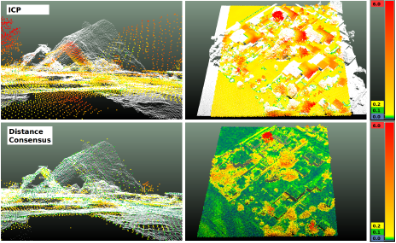
Robuste Registrierung von luftgestützten PunktwolkenZiel der Arbeit ist die robuste Registrierung von luftgestützten Punktwolken, die aus Airborne Laser Scanning (ALS) und Dense Image Matching (DIM) ab-geleitet wurden. Dafür wurde eine grobe, translative Registrierung mittels Ma-ximum Consensus Schätzers entwickelt und mit einem Standard-ICP vergli-chen. Des Weiteren wurden verschiedene Methoden zur Ausdünnung der Punktwolken untersucht, die besonders die Punkte von Objekten, die in den beiden Punktwolken unterschiedlich dargestellt sind, reduzieren soll.Leitung: Politz, BrennerTeam:Jahr: 2019
![]()
![]()
-
Tracking von Verkehrsteilnehmern mit LiDARAutonome Fahrzeuge navigieren auf der Basis von spurgenauen Karten. Diese Karten zu erstellen und zu pflegen ist mit einem hohen Aufwand verbunden. Diese Arbeit ist Teil des Automatisierungsprozesses, um aus Daten des täglichen Verkehrs spurgenaue Karten zu erstellen. Im Rahmen der Arbeit wird das Verhalten der Verkehrsteilnehmer in einem komplexen Kreuzungsszenario verfolgt. Es wurden sechs Kreuzungen in Hannover mittels statischen 3D LiDAR-Scans mit 10Hz vermessen, um Trainingsdaten für ein neuronales Netzt zu erstellen.Leitung: Steffen BuschTeam:Jahr: 2018
![]()
![]()
-
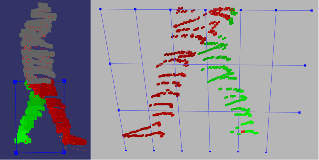
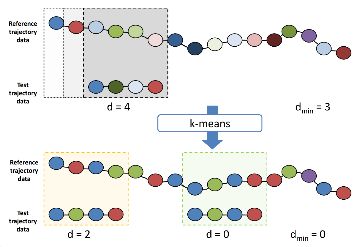
Verwendung eines Automotive-Laserscanners zur globalen PositionsbestimmungVor dem Hintergrund der globalen Lokalisierung wird in der Arbeit eine Möglichkeit vorgestellt, eine Positionsbestimmung anhand der Umgebungsmerkmale durchzuführen. Es werden Punktwolken von Straßenabschnitten in urbanem Gebiet verwendet. Dabei werden unter Anwendung eines neuronalen Netzes Merkmale aus der Umgebung extrahiert. Mit Hilfe einer Einteilung der Merkmale in verschiedene Klassen wird ein Streckenabschnitt als Sequenz von Merkmalen dargestellt. Durch den Vergleich mit einer Referenztrajektorie, welche ebenfalls über klassi zierte Merkmale verfügt, wird die aktuelle Position anhand der größten Übereinstimmung gefunden.Leitung: Dr. Alexander Schlichting, Prof. BrennerTeam:Jahr: 2018Laufzeit: 2018
![]()
![]()
-
Adding landmarks to maps using a graph-based approachDie zunehmende Automatisierung von Fahrfunktionen und erweiterte Komfortfunktionen sind aktueller Bestandteil der Automobilforschung. Eine der wesentlichen Voraussetzungen für viele zukünftige Funktionen, wie das automatisierte Fahren, ist die genaue Kenntnis der aktuellen Fahrzeugpose. Hierfür gibt es unterschiedliche Lokalisierungsmethoden. Wird eine Karte benutzt, welche auf Landmarken basiert, so stellt sich die Aufgabe, diese Landmarken auf Grundlage der Messungen zu aktualisieren.Leitung: Daniel Wilbers (VW), Prof. Ortmaier, Prof. BrennerTeam:Jahr: 2018
-
Deep Learning for Flood Relevant Images and Texts from Social MediaÜberschwemmungen gehören zu den häufigsten und zerstörerischsten Naturgefahren der Erde. Diese Arbeit untersucht die Idee, nutzergenerierte Informationen aus Social Media zu nutzen, um frühe Anzeichen hochwasserrelevanter Ereignisse zu erkennen. Das Ziel dieser Arbeit liegt in der Entwicklung und Implementierung einer Deep Learning Lösung mit der Fähigkeit, das Vorhandensein von hochwasserrelevanten Ereignissen aus benutzergenerierten Bildern und Texten zu erkennen.Leitung: Yu Feng, Prof. BrennerTeam:Jahr: 2018
![]()
![]()
-
Lernen typischer Parkplatzbelegungsmuster anhand von KartendatenZur Vorhersage zukünftiger Informationen über verfügbare Parkplätze werden in intelligenten Transportsystemen, wie beispielsweise Navigationsgeräten, unter anderem historische Daten über den Verlauf der Parkplatzbelegung verwendet. In dieser Arbeit wird untersucht, inwieweit solche Tagesverläufe mit der Hilfe von Kartendaten, wie z. B. Points of Interest, und der Verwendung von Methoden des Maschinellen Lernens vorhergesagt werden können. Dazu werden tatsächliche Belegungsdaten aus Hannover und aus San Francisco verwendet. Die Kartendaten werden sowohl aus OpenStreetMap, als auch aus Yelp gewonnen. Weiterhin werden unterschiedliche Varianten zur Implementierung der Kartendaten in das Maschinelle Lernen getestet, als auch die Relevanz der einzelnen Merkmale untersucht. Die hier verwendeten Methoden des Maschinellen Lernens sind ein Neuronales Netz, ein Regressionsbaum und eine Support Vector Machine.Leitung: Fabian Bock, Prof. BrennerTeam:Jahr: 2018
-
Laserscanner basierte Kartierung und Lokalisierung in dynamischen UmgebungenStand der heutigen Technik bei den in Industrieanlagen eingesetzten fahrerlosen Transportfahrzeugen ist eine Eigenlokalisierung auf Basis von Reflektoren. Da die Installation und Vermessung der benötigten Reflektoren zeitaufwändig und teuer ist, verlangen Anlagenbetreiber ein Lokalisierungsverfahren, das ohne Reflektoren funktioniert und ausschließlich die vorhandene Umgebungskontur zur Lokalisierung verwendet.Leitung: Brenner, SchlichtingTeam:Jahr: 2015Laufzeit: 2015
![]()
![]()
-
Kombination und Homogenisierung von Landmarkenkarten zur Steigerung der Positionierungsgüte beim automatischen FahrenIn dieser Arbeit werden Karten zur landmarkenbasierten Lokalisierung aus detektierten Objekten erzeugt, die mit einem Versuchsträger (PKW) erfasst wurden. Als Datengrundlage stehen die Positionen detektierter Objekte sowie die Fahrzeugtrajektorien der Messfahrten zur Verfügung. Die Erstellung einer Landmarkenkarte erfordert die Zuordnung einzelner Detektionen zu Objekten sowie eine Bereinigung systematischer Fehler. Die auftretenden systematischen Fehler äußern sich z.B. in Form von fehlerhaften Beobachtungswinkeln und zeitlicher Latenz.Leitung: Brenner, HofmannTeam:Jahr: 2015Laufzeit: 2015
![]()
![]()
-
Robust visual navigation for autonomous underwater track vehiclesUnderwater track vehicles, also known as crawler, are universal carrier platforms for many different applications. Crawler having an autonomous navigation would enable the possibility of executing long-term observations without a connection to a base station. This thesis presents approaches that use previous knowledge about the scene that is integrated into motion estimation step by replacing RANSAC with PROSAC to make the motion estimation more robust.Leitung: Brenner, KirchnerTeam:Jahr: 2015Laufzeit: 2015
-
Entwicklung eines Echtzeit-Planers für die lokale Navigation auf holonomen mobilen Service-RoboternEin grundlegendes Problem der Navigation ist die zuverlässige Vermeidung von Kollisionen mit Hindernissen in Echtzeit. Ein dafür genutzter lokaler Planer muss daher den Anforderungen der Echtzeitfähigkeit genügen, was bedeutet, dass die Planung innerhalb einer maximalen Laufzeit garantiert abgeschlossen werden muss. Die maximale Laufzeit kann dabei vom Rechner abhängen. Im Rahmen dieser Arbeit wurde ein lokaler Planer in der Software-Umgebung ROS (Robot Operating System) erstellt, welcher die Anforderung der Echtzeitfähigkeit erfüllt.Leitung: Brenner, WagnerTeam:Jahr: 2015Laufzeit: 2015
-
Extraktion von Fahrspurgeometrie und -topologie auf der Basis von FahrzeugtrajektorienDigitale Weg- und Transportkarten sind heutzutage die Grundlage moderner Navigation und finden in Disziplinen von der Ethologie bis zur Nautik unterschiedlichste Anwendungen. Der für diese Arbeit interessante Anwendungsfall ist die Abbildung von Verkehrswegen für Fahrzeuge als Straßenkarte. Eine Straßenkarte bildet hierbei mindestens die geometrische Struktur eines Verkehrsnetzes unter Erhalt der Konnektivität ab.Leitung: BrennerTeam:Jahr: 2014Laufzeit: 2014
![]()
![]()
-
Robotic exploration for mapping and change detectionAutonomous systems and mobile robots become more and more part of our daily life. Examples are cutting the grass in the garden, helping us to get into a parking lot or cleaning the floor. The problems of localization, perception and automatic model building (e.g. maps) are central questions in mobile robotics. How to determine the absolute pose of a robot? What is the best way to explore an a priori unknown environment? Can changes be detected?Leitung: Brenner, PaffenholzTeam:Jahr: 2014Laufzeit: 2014
![]()
![]()
-
Bewertung von inertialen Messsystemen mittels Laserscannern und bekannter LandmarkenLeitung: BrennerTeam:Jahr: 2012Laufzeit: 2012
![]()
![]()
-
Aufbau eines Laserscanner-Erfassungssystems zur Positionsbestimmung von FahrzeugenSowohl in der Forschung als auch in der Technik sind Fahrerassistenzsysteme für den Automobilbereich ein sehr aktuelles Thema. Neue Systeme unterstützen den Fahrer in unterschiedlichen Situationen, indem sie nicht nur den Fahrkomfort, sondern vor allem auch die Sicherheit im Straßenverkehr erhöhen. Viele dieser Systeme setzten eine sehr genaue Kenntnis über den eigenen Aufenthaltsort des Fahrzeuges voraus. Gerade in Gebieten mit dichter Bebauung ist dabei die mit dem Global Positioning System (GPS) erlangte Ortungsgenauigkeit in der Größenordnung mehrerer Meter unzureichend. Aus diesem Grund ist die Entwicklung eines genauen und zuverlässigen Verfahrens zur Positionsbestimmung für Fahrzeuge von großer Bedeutung.Leitung: BrennerTeam:Jahr: 2009Laufzeit: 2009
![]()
![]()
-
Zielführung in der Fahrzeug-Navigation mittels Mixed RealityLeitung: Brenner, PaelkeTeam:Jahr: 2006Laufzeit: 2006
![]()
![]()