Master Theses (finished)
-
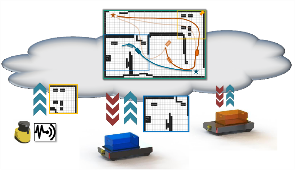
Development of a Client-Server Module for Cooperative Multi-Robot Longterm Map RegistrationNowadays a big amount of robots are used in production and logistic. Due to the large working environment, dynamic objects (e.g. humans or other robots), and semi-static objects (e.g.machine and furniture), a high performance navigation system is required. But only focus on the high performance long term SLAM on single robot is not enough to guarantee the flexible and accurate performance of whole robot fleet in large changing environment.Led by: Tobias Ortmaier (IMES), Claus Brenner, Steffen Busch (IKG), Philipp Schnattinger (FraunhoferIPA)Team:Year: 2019
![]()
![]()
-
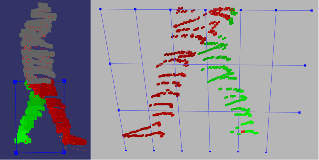
Classification and detection of road users using neural networks and Active Shape modelsAutonomous vehicles interpret their environment based on their sensor data. 360° laser scanners provide comprehensive and highly accurate information about the distance of objects. Predicting the behavior of road users differs between cars, trucks/buses, cyclists and pedestrians. The exact position of the different road users depends on their orientation and geometric dimensions. Active Shape models offer the possibility to estimate the center of objects by estimating deformable models, based on CAD plans and taking into account their orientation.Led by: Bodo Rosenhahn (TNT), Claus Brenner, Steffen Busch (IKG)Team:Year: 2019
![]()
![]()
-
Laser scanner-based prediction of pedestrian movements by filtering and classifying postureAgainst the background of road safety, an algorithm is presented below that uses point clouds to make the most accurate prediction possible about the future position of pedestrians. A core element is to classify the current state of movement of pedestrians over a random forest. The focus is on early detection of changes between individual states.Led by: Claus Brenner, Steffen BuschTeam:Year: 2019
![]()
![]()
-
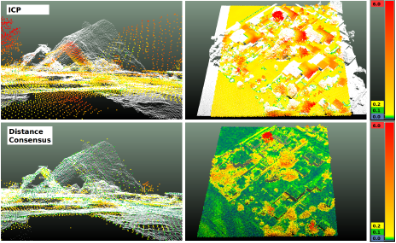
Robust registration of airborne point cloudsGoal of this thesis is the robust registration of airborne point clouds, which are derived from Airborne Laser Scanning (ALS) and Dense Image Matching (DIM). We implemented a coarse, translative registration method using a Maximum Consensus Estimator and compared our results with a standard ICP. In addition, we tested several methods to prune object points from point clouds, which are represented differently in both point cloud types.Led by: Politz, BrennerTeam:Year: 2019
![]()
![]()
-
Optimal assignment of point clouds using deep learningThe main goal of this master thesis was to register airborne 3D point clouds from different sensor systems. These point clouds are derived from airborne laser scanning (ALS) and dense image matching (DIM) of aerial images. Those point clouds may cover the same surface, but do contain different attributes and characteristics. One major problem when dealing with those two point clouds is vegetation. The laser beam in ALS is able to penetrate vegetation leading to ground and vegetation points in the final point cloud. Since they are derived from aerial images, DIM point clouds only contain the surfaces and thus describes the treetops. This major difference between ALS and DIM causes problems for the registration of point clouds and established algorithms such as the iterative closest points (ICP) algorithm are facing issues when dealing with both point cloud types at the same time, because they assume that similar points are close to each other.Led by: Brenner, PolitzTeam:Year: 2019
![]()
![]()
-
Klassifikation und Änderungsdetektion in Mobile Mapping LiDAR Punktwolken3D-Modelle der statischen Umgebung zu erstellen ist eine wichtige Aufgabe für das Voranbringen von Fahrerassistenzsystemen und dem autonomen Fahren. Hierzu stehen in dieser Arbeit Mobile Mapping LiDAR Punktwolken aus 14 Messepochen zur Verfügung, die mithilfe eines Voxel Grids zu einer Referenzkarte weiterverarbeitet werden. Ein Voxel Grid ist eine Datenstruktur, die den realen Raum in volumenhafte Elemente unterteilt und die Punktdichte der Punktwolken reduziert. Zusätzlich werden Daten aus einer Strahlverfolgung bereitgestellt, sodass zwischen durchschossenen und unbekannten Voxeln unterschieden werden kann, wodurch sich Verdeckungen erkennen lassen.Led by: Brenner, SchachtschneiderTeam:Year: 2019
![]()
![]()
-
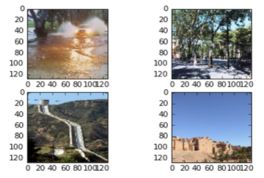
Deep Learning for Flood Relevant Images and Texts from Social MediaFloods are among Earth's most common and most destructive natural hazards. This work explores the idea of utilizing user-generated information from social media to recognize early signs of flood relevant events. The goal of this work lies in the development and implementation of a Deep Learning solution with the ability to detect the presence of flood relevant events from user-generated images and texts.Led by: Yu Feng, Prof. BrennerTeam:Year: 2018
![]()
![]()