Robust registration of airborne point clouds
| Led by: | Politz, Brenner |
| Team: | Jannik Busse |
| Year: | 2019 |
| Is Finished: | yes |
This thesis presents a robust, three degree of freedom registration method for the coarse, translational alignment of point clouds based on Maximum Consensus. It also introduces a fast method of robust registration for the same purpose, as well as pruning methods that remove points which are likely to prove disadvantageous during the registration process.
Central to the work is the aspect of point clouds originating from airborne laser scanner and airborne camera data. This duality of data introduces problems due to different point density and noise behaviour, as well as incongruous features between clouds.Therefore, a solution for the robust alignment of point clouds originating from airborne laser scanner and airborne camera data was sought for. Following a coarse to fine strategy, an initial alignment algorithm was invented while relying on the ICP for final registration. Additionally, Pruning methods were devised for the incongruous point cloud data in preparation of the fine registration.
The creation of reference values was realised by balancing out the alignments of manually picked point pairs to estimate a final registration. The reference data was used throughout the following experiments, laying a foundation to compare algorithm results to.
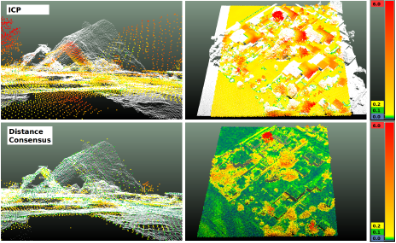
To reach the goal of robust coarse alignment, a version of the Maximum Consensus featuring a cubic solution space and three consensus criteria has been introduced and tested. The implemented criteria were based on Point Distances (Distance Consensus), Normal Angle Differences (Normal Vector Consensus) and a combination of these two named Combined Consensus. The criterium of Distance Consensus resulted in the most robust and accurate coarse alignment, albeit being rather slow in execution. Still, without Pruning methods, an alignment using Distance Consensus and ICP combined in a coarse to fine approach failed due to the difficulty of incongruous point cloud data.
Furthermore, a method called Accumulator was implemented and tested with the aim of decreasing the runtime of the Distance Consensus mentioned before. This approach used a distance criterium for estimating the consensus measure and featured a spherical solution space. The Accumulator succeeded in decreasing the runtime of the Distance Consensus, yet it did also decrease the robustness of the coarse alignment because too many equally rated solutions were produced.
To apply the ICP algorithm to the incongruous data, Pruning was introduced. The Pruning of point clouds included five different approaches. Border Pruning removed the outer edges of one cloud to rule out edge-related biases in registration. Water Body Pruning removed terrain features that are only detectable by one of the two sensors used for point cloud acquisition. Sigma Pruning made use of the standard deviation computed in the process of normal vector calculation and removed points that lay in non-planar regions of the pruned cloud. Normal Vector Pruning established nearest neighbour pairs with the corresponding point cloud and removed points that showed high normal angle differences to its neighbours. Finally, Point Distance Pruning removes points whose nearest neighbour in the corresponding cloud is further away than a threshold, based on nearest neighbour pairs as well.
The Pruning test results were of mixed quality, with Point Distance Pruning having the most beneficial effect. Combined with Border Pruning and Water Pruning, Distance Pruning was used throughout later tests. Interestingly, this Pruning method in combination with the ICP for fine registration resulted in an alignment even more accurate than the one produced with an added initial coarse alignment step realised by Distance Consensus or Accumulator. This is because the existing alignment of the data was even more accurate than the coarse registration results produced. In addition, it was discovered that Point Distance Pruning introduced a harmful data bias that made ICP alignment changes less likely.
Finally, Distance Consensus-Pruning-ICP was chosen to be the most robust solution, while Pruning-ICP as an alternative already produced sufficient results with the given data.