Completed Bachelor Theses
-
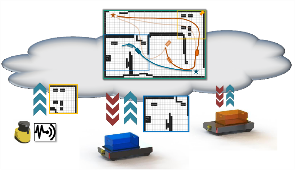
Trajectory modelingWith global navigation satellite systems and their free positioning services, as well as small, low-cost GNSS receivers, it's never been easier to capture and record motion anywhere, anytime. The resulting data volumes can quickly become very large. This makes these records impractical when it comes to storage and evaluation. Approaches to reduce the amount of data while preserving a maximum of spatio-temporal information are required.Led by: Colin FischerTeam:Year: 2016Duration: 2016
![]()
![]()


Completed Master Theses
-
Evaluating uncertainty estimation techniques using deep leaning models for classification of point cloudsDeep learning models have proven their ability to perform powerful classification and segmentation considering both 2d and 3D datasets. However, these classifications are often assumed to be accurate, without providing how reliable are these decisions made by the model. There are some possible techniques to convert a stochastic deep learning model into a probabilistic one, to provide a distribution over the weights, instead of finding point estimation for them, leading to an output distribution. Such distribution over output of a model shows not only the true class but also its reliability as the variance of the distribution.Led by: ShojaeiYear: 2024
-
Hololens 2 - Analysis of capabilities and qualityThe Hololens is a device, which captures information of the environment and creates a 3D model of it. At the same time, it is able to place virtual objects into the environment and thus allows AR-applications. The goal of the thesis is to investigate the potential of the Hololens for capturing indoor environments. This includes the acquisition of 3D point clouds and a thorough quality assessment. Subsequently, the point could has to be processed in order to segment important objects or features (e.g. walls, furniture). To this end, the use of Deep Learning models has to be considered.Led by: Kamalasanan, SesterYear: 2023
![]()
![]()
-
Future trajectory and Motion guidance with Augmented realityControlling pedestrian motion pattern using augmented reality would require explainable visualizations to convince the user to change directions and speed of motion. Such AR visualizations should avoid cognitive overload and should provide motion guidance that are accurate representations of expected user actions to avoid conflicts / collisions. The focus of this master thesis would be to design and evaluate 3D motion guidance augmentations using AR emphasizing how such visualizations can avoid collisions between pedestrian / smartphone zombie. The student is expected to design and validate motion guidance visualizations in augmented realityLed by: Kamalasanan, SesterYear: 2023
![]()
![]()
-
Occupancy-free Space Modeling and Navigation Path Planning in a 3D Voxel Grid Environment for Urban Digital Twin ApplicationsThe urban digital twin is an innovative concept within smart city technology, aiming to develop integrated and intelligent systems by harnessing diverse data from a multitude of sensors. Three-dimensional (3D) geodata plays a pivotal role in the representation and operation of urban digital twins. Tasks such as smart space management and navigation have become increasingly essential in urban digital twin applications, and they can be effectively facilitated using a foundation of 3D geospatial data. Therefore, this master thesis focuses on the modeling of unoccupied space and navigation path planning, employing a 3D voxel grid environment representation. The objective of the thesis is to develop a suitable approach for defining vacant space within urban area, which is utilized to enable collision-free 3D navigation. To achieve this, it is proposed to integrate the point cloud data of the Hannover urban area into a 3D voxel grid structure. In this context, grid cells containing point cloud data are treated as obstacles, while unoccupied cells are collectively constitute the occupancy-free space. The identified vacant space serve as a graph for implementing the shortest path algorithm. Ultimately, both the occupancy-free space and an illustrative route through it are visualized to demonstrate the approach viability.Led by: Shkedova, FeuerhakeTeam:Year: 2023
![]()
![]()
-
Development of an approach for integrating various format data into a 3D voxel-based Urban Digital twinThe advancements in instruments and methodologies for collecting, transmitting, analyzing, and representing three-dimensional (3D) geodata over the past few decades have opened up extensive possibilities for various applications. 3D geoinformation plays a pivotal role in the operational frameworks of Smart City technology that can be represented within an Urban Digital Twin concept. This involves utilizing diverse data from numerous sensors and designing an adaptive digital model that learns from and evolves alongside the real city.Led by: Shkedova, Feuerhake, SesterYear: 2023
![]()
![]()
-
Identification and analysis of movement patterns in trajectoriesIn this work, movement patterns in trajectory datasets are identified with respect to the respective visited locations of a trajectory. For this purpose, further semantic information is assigned to the whereabouts points depending on the position, time of day, and duration of stay; the assignment of semantic information with respect to position is done using OpenStreetMap data. Another focus was on the identification of related trajectory segments, since the given dataset was anonymized as a consequence of data protection; for this purpose, coordinate prediction was performed for all trajectory endpoints in order to identify a suitable continuing starting point of another trajectory using a proximity search and temporal proximity. Recurrent motion pattern detection performed based on the whereabouts points does not produce meaningful patterns detected in multiple trajectories throughout the dataset for the datasets used; however, meaningful recurrent patterns are found for individual trajectories. An increasing level of detail in assigning categories with respect to whereabouts results in fewer recurring patterns, which, on the other hand, allow for greater meaningfulness given the interpretation of an observed person’s movement behavior.Led by: Golze, Feuerhake, Wage, SesterTeam:Year: 2022
-
Hololens 2 – Evaluating 3D Mapping and Technical CapabilitiesIn this study, the technical and 3D mapping capabilities of Hololens 2 was evaluated. The Microsoft Hololens 2 is a head-worn mobile mixed reality device that is capable of mapping its direct environment in real time. It is equipped with different sensors including four visible light tracking cameras and a depth sensor. The 3D map created using these sensor streams can be accessed by research mode. This makes Hololens 2 a powerful tool for mapping an indoor space. In this work, we evaluate the capabilities of Hololens 2 with respect to the task of the 3D indoor mapping, semantic segmentation and 3D modelling as the quality of scanned data highly influences the accuracy of reconstruction and segmentation.Led by: Vinu Kamalasanan, Monika SesterTeam:Year: 2022
![]()
![]()
-
Development of a modular sensor platform for mobile detection of vehicle encountersRiding a bike in a shared traffic area with motor vehicles causes discomfort for many bicyclists. Avoiding busy roads is only possible with good local knowledge, as no data is available on the frequency of encounters with motor vehicles on most roads. Acquiring a dataset that collects smartphone sensor data on vehicle encounters could become the basis for a smartphone-based vehicle detector. Magnetometer and barometer readings are used as indicators of passing vehicles. In this thesis, a sensor platform is first constructed to collect smartphone and other sensor data while driving. The system is designed to be used with other sensor configurations in the future. A methodology is then presented to create a dataset of vehicle encounters based on data from a camera and a distance sensor on the sensor platform. This data set contains all important sensor data of a commercially available smartphone including the timestamp of vehicle encounters. Finally, a three-class classifier is trained and evaluated based on the data set. It is investigated which approach can provide a generalizable classifier. Approaches based on Random Forests are investigated for the classifier. The structure and parameters of a sliding window function are adjusted for feature generation.Led by: Wage, Feuerhake, Golze, SesterTeam:Year: 2022
![]()
![]()
-
Nutzungsdatengetriebene Analyse des Potentials von MikromobilitätsdienstenDer geteilten Mobilität wird in der öffentlichen Debatte um die Verkehrswende häufig eine entscheidende Rolle zugeordnet. Darunter fallen auch die sogenannten Mikromobilitätsdienste. Das Ziel dieser Masterarbeit ist es, das Potential von Mikromobilitätsdiensten für die Verkehrswende im Hinblick auf die Intentionen der Nutzer, auf zeitliche Variationen, sowie auf Vorteile gegenüber anderen Transportmitteln datenbasiert zu bewerten. Dafür wird eine Fallstudie anhand von Mobilitätsdaten der Bikesharing-Fahrräder und Elektrotretroller zweier Anbieter in Hannover durchgeführt.Led by: Wage, Feuerhake, GolzeTeam:Year: 2022
![]()
![]()
-
Comparison of network representations for analysing temporal power plant dataAs renewable energy is increasingly used in power generation, the temporal and spatial balance of electric power supply and demand requires large-scale power transmission to maintain. Describing such systems requires network modeling theory. This dissertation takes the German power transmission network as an example and explores the impact of different representations. The representation forms include unweighted network, weighted network, multiplex network and interconnected network. In this dissertation, the static topological characteristics of networks under different representations are examined. Then, the temporal data of the available capacity is also introduced, and a temporal network with the power flow path as the time variable is constructed based on Djikstra’s algorithm. In this research, we find that the weighted network is more suitable for modeling transmission networks than the unweighted network, and the multi-layer network may be more suitable for modeling more complex systems.Led by: Anna Malinovskaya, Philipp OttoTeam:Year: 2022
![]()
![]()
-
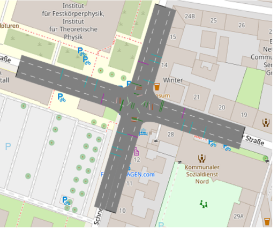
Trajectory Analysis at IntersectionsIn this thesis, we focus on trajectories at different intersections with various regulated types (traffic-light-controlled, priority/yield- controlled, uncontrolled) and test some methods to detect and recognise movement patterns, in terms of their geometrical and spatio-temporal components. That is, in the first case the geometric paths that vehicles follow while driving through the intersections and in the second case the way that they follow these geometric paths.Led by: ZourlidouTeam:Year: 2020
![]()
![]()
-
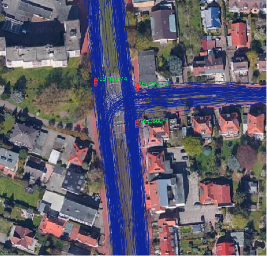
Trajectory anomaly detection using spectral clustering and RNN-based auto-encoderAnomaly detection is important, because anomalous behavior may indicate critical events or objects within diverse research areas and application domains. One of such domains is transport, especially integrated urban mobility. Trajectories of moving objects are good representations of their behaviors in surveillance data and useful in detecting anomalous behavior. On one hand, trajectories can provide more agent-based, long-term information comparing with simple physical features. On the other hand, comparing with raw video data, which is usually represented as a sequence of images, trajectory data requires less storage space and computational resources. Moreover, it has a wide variety of sources, such as GPS instruments and laser-scanners.Led by: Sester, KoetsierTeam:Year: 2020
![]()
![]()
-
Optimal assignment of point clouds using deep learningThe main goal of this master thesis was to register airborne 3D point clouds from different sensor systems. These point clouds are derived from airborne laser scanning (ALS) and dense image matching (DIM) of aerial images. Those point clouds may cover the same surface, but do contain different attributes and characteristics. One major problem when dealing with those two point clouds is vegetation. The laser beam in ALS is able to penetrate vegetation leading to ground and vegetation points in the final point cloud. Since they are derived from aerial images, DIM point clouds only contain the surfaces and thus describes the treetops. This major difference between ALS and DIM causes problems for the registration of point clouds and established algorithms such as the iterative closest points (ICP) algorithm are facing issues when dealing with both point cloud types at the same time, because they assume that similar points are close to each other.Led by: Brenner, PolitzTeam:Year: 2019
![]()
![]()
-
Klassifikation und Änderungsdetektion in Mobile Mapping LiDAR Punktwolken3D-Modelle der statischen Umgebung zu erstellen ist eine wichtige Aufgabe für das Voranbringen von Fahrerassistenzsystemen und dem autonomen Fahren. Hierzu stehen in dieser Arbeit Mobile Mapping LiDAR Punktwolken aus 14 Messepochen zur Verfügung, die mithilfe eines Voxel Grids zu einer Referenzkarte weiterverarbeitet werden. Ein Voxel Grid ist eine Datenstruktur, die den realen Raum in volumenhafte Elemente unterteilt und die Punktdichte der Punktwolken reduziert. Zusätzlich werden Daten aus einer Strahlverfolgung bereitgestellt, sodass zwischen durchschossenen und unbekannten Voxeln unterschieden werden kann, wodurch sich Verdeckungen erkennen lassen.Led by: Brenner, SchachtschneiderTeam:Year: 2019
![]()
![]()
-
Semi-Supervised Deep Learning for Object Detection in Airborne Laser Scanning DataThe main objective of this experiment is to compare the performance of Semi-Supervised Learning classification method and normal convolutional neural network classification method on Airborne Laser Scanning data (ALS) and find out the best suitable model that we can use to detect object in a large-scale region by using windows sliding approach. The data I used is digital terrain model (DTM) which generated by ALS point cloud and contains 4 different classes. In each class include 6 different visualization formats (digital terrain model, sky-view factor, local Dominance, positive-negative openness and simple local relief model) which use different visualization techniques to be generated from the original digital terrain model.Led by: KazimiTeam:Year: 2019
![]()
![]()
-
Development of environmentally-balaced and congestion-avoiding routing algorithms by means of traffic simulationDue to the constantly growing volume of traffic in urban environments and the resulting problems such as increased air pollution, environmentally oriented approaches to achieve better urban sustainability of transport play an increasingly important role. This thesis deals with the development of environmentally-friendly routing algorithms and their validation in traffic simulations. The routing algorithm used is the A* - algorithm using the developed criteria as weights.Led by: Sester, FuestTeam:Year: 2019
![]()
![]()
-
Development of a Client-Server Module for Cooperative Multi-Robot Longterm Map RegistrationNowadays a big amount of robots are used in production and logistic. Due to the large working environment, dynamic objects (e.g. humans or other robots), and semi-static objects (e.g.machine and furniture), a high performance navigation system is required. But only focus on the high performance long term SLAM on single robot is not enough to guarantee the flexible and accurate performance of whole robot fleet in large changing environment.Led by: Tobias Ortmaier (IMES), Claus Brenner, Steffen Busch (IKG), Philipp Schnattinger (FraunhoferIPA)Team:Year: 2019
![]()
![]()
-
Classification and detection of road users using neural networks and Active Shape modelsAutonomous vehicles interpret their environment based on their sensor data. 360° laser scanners provide comprehensive and highly accurate information about the distance of objects. Predicting the behavior of road users differs between cars, trucks/buses, cyclists and pedestrians. The exact position of the different road users depends on their orientation and geometric dimensions. Active Shape models offer the possibility to estimate the center of objects by estimating deformable models, based on CAD plans and taking into account their orientation.Led by: Bodo Rosenhahn (TNT), Claus Brenner, Steffen Busch (IKG)Team:Year: 2019
![]()
![]()
-
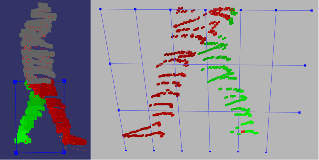
Laser scanner-based prediction of pedestrian movements by filtering and classifying postureAgainst the background of road safety, an algorithm is presented below that uses point clouds to make the most accurate prediction possible about the future position of pedestrians. A core element is to classify the current state of movement of pedestrians over a random forest. The focus is on early detection of changes between individual states.Led by: Claus Brenner, Steffen BuschTeam:Year: 2019
![]()
![]()
-
Travel Delay Analysis Using VISSIM and Pattern Recognition at Regulated JunctionsThis thesis explores the travel time and travel delay at T- and four-way junctions under different regulator settings (yield/priority traffic signs and uncontrolled junctions), conducting experiments both with simulation originated and real data. First this thesis uses VISSIM simulation software to estimate the delay and stop time at yield controlled and uncontrolled T- and and Four-way intersections. At the second part of the thesis, the same objective is being pursued by using real data.Led by: ZourlidouTeam:Year: 2019
![]()
![]()
-
Pattern Recognition of Movement Behavior for Intersection Classification using GPS Trace DataThe aim of this thesis is to classify different regulator types of traffic road intersections based on GPS trace data. To reach this aim a variety of features is calculated to describe the driving behavior at intersections. These are derived from the measured units of the GPS trace data that compose an individual’s movement trajectory.Led by: ZourlidouTeam:Year: 2019
![]()
![]()
-
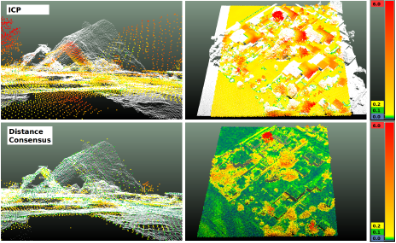
Robust registration of airborne point cloudsGoal of this thesis is the robust registration of airborne point clouds, which are derived from Airborne Laser Scanning (ALS) and Dense Image Matching (DIM). We implemented a coarse, translative registration method using a Maximum Consensus Estimator and compared our results with a standard ICP. In addition, we tested several methods to prune object points from point clouds, which are represented differently in both point cloud types.Led by: Politz, BrennerTeam:Year: 2019
![]()
![]()
-
Deep Learning for Flood Relevant Images and Texts from Social MediaFloods are among Earth's most common and most destructive natural hazards. This work explores the idea of utilizing user-generated information from social media to recognize early signs of flood relevant events. The goal of this work lies in the development and implementation of a Deep Learning solution with the ability to detect the presence of flood relevant events from user-generated images and texts.Led by: Yu Feng, Prof. BrennerTeam:Year: 2018
![]()
![]()
-
Automatic enrichment of route instructions to form a cognitive mapCommonly used navigation instructions are based on metric turn descriptions (like "turn left onto Nienburger Straße in 100 m"). For the user it is easy to follow the course, but later it is hard to remember how s/he got there. Natural orientation is based on remarkable objects or locations called landmarks. Multiple of them are combined to the psychological model of a cognitive map, a network of landmarks and connecting actions. The resulting goal is to enhance the people's own sense of orientation by enriching common routing instruction with hints on landmarks. The automatic description of relevant landmarks along a route is implemented as a interactive web-map.Team:Year: 2017Duration: 2017
![]()
![]()
-
Gesture-based interaction with virtual 3D environmentsWith the availability of increasingly powerful computing technology in the home/leisure sector, a race to develop affordable virtual reality (VR) and augmented reality hardware broke out on the technology market a few years ago, targeting potential markets, in particular, for realistic 3D content presentation (e.g. computer games). The core of this technology is the processing of three-dimensional information in the form of 2D stereo image pairs, which can be consumed via suitable output hardware (glasses/helmets). However, this principle can also be used elsewhere, for example for better exploration of or interaction with 3D spatial data.Led by: Colin FischerTeam:Year: 2016Duration: 2016
![]()
![]()