Bachelorarbeiten (abgeschlossen)
-
Erzeugen von Routen unter Berücksichtigung der SonneneinstrahlungWie bereits seit 200 Jahren bekannt ist, leiden Bewohner der nördlichen Breiten überdurchschnittlich häufig unter einem Vitamin D Mangel. Um diesem entgegenzuwirken sollte sich der Mensch dem richtigen Maß an Sonnenstrahlung aussetzen. Für Stadtbewohner ist dieses Ziel während der Arbeitswoche jedoch schwer zu erreichen, da die meiste Zeit des Tages in geschlossenen Räumen verbracht wird. Gelöst werden soll dieses Problem durch ein Routing, welches Fußwege hinsichtlich der Sonneneinstrahlung optimiert. Wichtigste Faktoren sind neben der draußen verbrachten Zeit und der Fläche der von der Sonne bestrahlten Haut die Verschattung durch Gebäude und Vegetation sowie die Orientierung zur Sonne.Leitung: Monika Sester, Oskar WageTeam:Jahr: 2020
![]()
![]()
-
Anpassung von Gebäudegrundrissen aus Lidardaten an ALK-DatenIn der ALK sind Gebäude über ihre Grundrisse dargestellt. In luftgestützten Laserdaten bilden sich Gebäude als 3D-Formen ab. Aufgrund unterschiedlicher Erfassungsvorschriften und Aktualitätsstände kann es zu Verschiebungen zwischen diesen Datenbeständen kommen. Ziel der Arbeit ist es, diese Verschiebungen zu bestimmen und automatisch zu korrigieren.Leitung: Politz, SesterJahr: 2020
![]()
![]()
-
Simulation von GPS-Trajektorien als Trainingsdaten für das maschinelle Lernen von WegeachsenIn dieser Arbeit wird ein Algorithmus zur Simulation von realitätsnahen GPS-Trajektorien, als Trainingsdaten für ein Convolutional Neural Network, für den Bewegungsmodus Kraftfahrzeug präsentiert. Dazu wird das Straßennetz aus OpenStreetMap für ein Auswahlgebiet zu einem routingfähigen Graphen aufbereitet. Den verschiedenen Straßentypen werden charakteristische Straßenbreiten und Fahrstreifenanzahlen zugewiesen, aufgrund dessen Hilfsgeometrien für Fahrspuren generiert werden.Leitung: Frank Thiemann, Prof. SesterTeam:Jahr: 2018
![]()
![]()





Masterarbeiten (abgeschlossen)
-
Development of an approach for integrating various format data into a 3D voxel-based Urban Digital twinThe advancements in instruments and methodologies for collecting, transmitting, analyzing, and representing three-dimensional (3D) geodata over the past few decades have opened up extensive possibilities for various applications. 3D geoinformation plays a pivotal role in the operational frameworks of Smart City technology that can be represented within an Urban Digital Twin concept. This involves utilizing diverse data from numerous sensors and designing an adaptive digital model that learns from and evolves alongside the real city.Leitung: Shkedova, Feuerhake, SesterJahr: 2023
![]()
![]()
-
Future trajectory and Motion guidance with Augmented realityControlling pedestrian motion pattern using augmented reality would require explainable visualizations to convince the user to change directions and speed of motion. Such AR visualizations should avoid cognitive overload and should provide motion guidance that are accurate representations of expected user actions to avoid conflicts / collisions. The focus of this master thesis would be to design and evaluate 3D motion guidance augmentations using AR emphasizing how such visualizations can avoid collisions between pedestrian / smartphone zombie. The student is expected to design and validate motion guidance visualizations in augmented realityLeitung: Kamalasanan, SesterJahr: 2023
![]()
![]()
-
Exploring Herrenhausen GardensDevelopment of an Location Based Interactive Mobile Web Application for Enriching Visitors' Knowledge and ExperienceLeitung: Feuerhake, SesterJahr: 2023
![]()
![]()
-
Hololens 2 - Analysis of capabilities and qualityThe Hololens is a device, which captures information of the environment and creates a 3D model of it. At the same time, it is able to place virtual objects into the environment and thus allows AR-applications. The goal of the thesis is to investigate the potential of the Hololens for capturing indoor environments. This includes the acquisition of 3D point clouds and a thorough quality assessment. Subsequently, the point could has to be processed in order to segment important objects or features (e.g. walls, furniture). To this end, the use of Deep Learning models has to be considered.Leitung: Kamalasanan, SesterJahr: 2023
![]()
![]()
-
Identifikation und Analyse von Bewegungsmustern in TrajektorienIn dieser Arbeit werden Bewegungsmuster in Trajektoriendatensätzen hinsichtlich der jeweiligen besuchten Orte einer Trajektorie identifiziert. Dazu werden den Aufenthaltspunkten weitere semantische Informationen abhängig von der Position, der Tageszeit und der Aufenthaltsdauer zugewiesen; die Zuweisung von semantischen Informationen hinsichtlich der Position erfolgt mit Hilfe von OpenStreetMap-Daten. Ein weiterer Schwerpunkt lag auf der Identifikation von zusammengehörigen Trajektorienteilstücken, da der gegebene Datensatz als Folge des Datenschutzes anonymisiert wurde; dazu wurde eine Koordinatenprädiktion für alle Trajektorien-Endpunkte durchgeführt, um mit Hilfe einer Umkreissuche und der zeitlichen Nähe einen geeigneten weiterführenden Anfangspunkt einer anderen Trajektorie zu identifizieren. Die auf Basis der Aufenthaltspunkte durchgeführte Erkennung von wiederkehrenden Bewegungsmustern erzeugt bei den verwendeten Datensätzen keine aussagekräftigen Muster, die im gesamten Datensatz in mehreren Trajektorien detektiert werden; allerdings werden für einzelne Trajektorien aussagekräftige, wiederkehrende Muster gefunden. Ein steigender Detailgrad bei der Zuweisung von Kategorien hinsichtlich des Aufenthaltsortes resultiert in weniger wiederkehrenden Mustern, die hingegen eine höhere Aussagekraft angesichts der Interpretation des Bewegungsverhaltens einer beobachteten Person zulassen.Leitung: Golze, Feuerhake, Wage, SesterTeam:Jahr: 2022
-
Entwicklung einer modularen Sensorplattform zur mobilen Erfassung von FahrzeugbegegnungenDas Fahrradfahren im gemeinsamen Verkehrsraum mit Kraftfahrzeugen bereitet vielen Radfahrer*innen Unbehagen. Das Meiden stark befahrener Straßen ist nur mit guter Ortskenntnis möglich, da zur Häufigkeit der Begegnungen mit Kraftfahrzeugen auf den meisten Straßen keine Daten vorliegen. Die Erfassung eines Datensatzes, der Smartphone-Sensordaten über Fahrzeugbegegnungen sammelt, könnte die Grundlage für einen Smartphone-basierten Fahrzeugdetektor bilden. Magnetometer- und Barometer-Messwerte werden als Indikatoren für vorbeifahrende Fahrzeuge verwendet. In dieser Arbeit wird zunächst eine Sensorplattform konstruiert, die zur Erhebung von Smartphone- und anderen Sensordaten im Fahrbetrieb dient. Das System ist so ausgelegt, dass es auch in Zukunft mit anderen Sensorkonfigurationen genutzt werden kann. Daraufhin wird eine Methodik vorgestellt, die auf Basis der Daten einer Kamera und eines Abstandssensors an der Sensorplattform einen Datensatz von Fahrzeugbegegnungen erzeugt. Dieser enthält zu den gefahrenen Trajektorien alle wichtigen Sensordaten eines handelsüblichen Smartphones inklusive der Zeitpunkte von Fahrzeugbegegnungen. Ab- schließend wird auf Basis des Datensatzes ein dreiklassiger Klassifikator trainiert und evaluiert. Dabei wird untersucht, welcher Ansatz einen generalisierbaren Klassifikator liefern kann. Für den Klassifikator werden mehrere auf dem Random Forest basierende Ansätze untersucht. Dabei werden Aufbau und Parameter einer Sliding-Window-Funktion zur Feature-Erzeugung angepasst.Leitung: Wage, Feuerhake, Golze, SesterTeam:Jahr: 2022
![]()
![]()
-
Hololens 2 – Evaluating 3D Mapping and Technical CapabilitiesIn this study, the technical and 3D mapping capabilities of Hololens 2 was evaluated. The Microsoft Hololens 2 is a head-worn mobile mixed reality device that is capable of mapping its direct environment in real time. It is equipped with different sensors including four visible light tracking cameras and a depth sensor. The 3D map created using these sensor streams can be accessed by research mode. This makes Hololens 2 a powerful tool for mapping an indoor space. In this work, we evaluate the capabilities of Hololens 2 with respect to the task of the 3D indoor mapping, semantic segmentation and 3D modelling as the quality of scanned data highly influences the accuracy of reconstruction and segmentation.Leitung: Vinu Kamalasanan, Monika SesterTeam:Jahr: 2022
![]()
![]()
-
Visual communication of bicycle routes using cartographic symbolizationThe present work focuses on the visualization of specially selected features that occur on a bicycle route and that influence comfort while driving. Routes in an urban environment, which are represented by edges of a graph, are mainly used for visualization. These edges of a route are individually mapped with a visual variable each so that the underlying feature appears in a map display. The variants created in this way for one of five characteristics are tested in a user study for efficiency, effectiveness, attractiveness and suitability and compared with more information-rich visualizations. The result of the evaluation reveals that color representations as well as representations with symbols or signatures are perceived as the most ideal.Leitung: Golze, Wage, Fuest, Feuerhake, SesterTeam:Jahr: 2021
![]()
![]()
-
Visual route communication via geometric deformationThis thesis proposes visual route communication via geometric deformation while providing map readers with different route options and helping them by visual means distinguish the most efficient route according to their personal preferences. The proposed communication is directed to create individual routing solutions, motivate travelers to avoid paths traversing the territories, which should be circumvented for different reasons. For route communication via geometric deformation, human psychological aspects were examined. For representation, existing visual variables were investigated and taken as a basis. The deformation method for the thesis found inspiration in perspective drawing art techniques, previously introduced multiple scales designs for maps, geometric projections, and distortions. Finally, the idea to visualize roads in the shape of a hollow or a pit was created. For the deformation implementation, two approaches were proposed in the thesis. The first method is based on the variable scales design. The foundation of the second method is lens distortion. As part of the thesis, an automated system for deformation was realized.Leitung: Fuest, SesterTeam:Jahr: 2021
![]()
![]()
-
Reinforcement learning-based sharing data selection for collective perception of connected autonomous vehiclesIn this thesis, a deep reinforcement learning model is proposed to reduce the redundancy of CPMs for the raw point cloud data sharing scenario in the CAV networks. By combining deep reinforcement learning with collaborative perception, a RL based method for selecting collective perception data that uses the DDQN algorithm is implemented. Through this model, the vehicle can intelligently select the data to be transmitted, thereby eliminating redundant data in the network, saving limited network resources, and reducing the risk of communication network congestion.Leitung: Prof. Markus Fidler, Prof. Monika Sester, Yunshuang Yuan, Shule Li, Sören SchleibaumTeam:Jahr: 2021
![]()
![]()
-
Range and FoV Estimation of Pedestrian Detection in a Helmet Mapping SystemWhile LIDAR based mobile mapping systems have been used to map the indoor spaces to create indoor maps, such LIDAR based systems can also be used observe motion information while mapping the environment. This motion information can be used to understand the footfall and useful to businesses and also civil engineers for better planning. The objective of the work would be to achieve a Helmet mounted mapping system (HMS) using a Velodyne and IMU and its range estimation in detecting dynamic pedestrians. The HMS is an apparatus consisting the Velodyne and IMU mounted on an industry grade Helmet. Two kinds of existing learning methods, the Complex-YOLO with optimized parameters and PointPillars are applied by training a low-resolution simulated KITTI dataset.Leitung: Kamalasanan, Busch, SesterTeam:Jahr: 2021
![]()
![]()
-
Spatiotemporal Calibration between a Helmet Mapping System and the HoloLens Augmented Reality SystemMobile mapping systems are used to map indoor environments by utilising LIDAR sensors. These sensors when worn with a helmet via the Helmet mapping system (HMS) can also be integrated with Augmented reality (AR) devices like the HoloLens 2. Such integration can be beneficial for real-time 3D visualisation of sensor data. To achieve an integrated system, the HMS and AR device needs to be precisely time synchronized matching the different sensors rates running on different operating systems. The objective of this thesis is to achieve time synchronization and rigid body transformation between a helmet-mounted mapping systems (HMS) equipped with an Xsens IMU module and an Augmented Reality (AR) system HoloLens 2. Pedestrian motion was tested to find patterns for data synchronization using human movement only.Leitung: Kamalasanan, Busch, SesterTeam:Jahr: 2021
![]()
![]()
-
A Generative Model with a Mixture Density Network for Trajectory PredictionUsing real-world data to predict road users' trajectories in shared space is critical for many intelligent systems. The related methods are also applicable in some industrial scenarios, e.g., mobile robotics in warehouses and factories. However, the road user's movement is affected by the behaviors of its neighboring agents in different environments, so their dynamic is complex and uncertain. Therefore, it is full of challenges to effectively and accurately predict the future trajectories of each agent. Based on the generative model Dynamic Context Encoder Network (DCENet), a mixture density network replaces its decoder. Rather than output the trajectories directly, the mixture density network outputs a mixture distribution of the potential future trajectories by using the network parameters. The framework's performance is evaluated using a challenging trajectory prediction benchmark called Trajnet. Compared to DCENet, in this thesis, the novel framework with a mixture density network makes predictions by sampling from the distribution with the maximum mixture weights, thus increasing the chance to choose the most likely future trajectory.Leitung: Hao Cheng, Monika Sester, Annika RaatzTeam:Jahr: 2021
![]()
![]()
-
Planning Highway Vehicle Trajectories Using a Generative Approach with Interaction ModelingHighways are full of dynamic situations, such as high-speed traffic and unexpected lane changes. A driver needs to maintain close attention to the neighboring vehicles when driving on the highway, which may cause fatigue after long driving. Accurately predicting future trajectories of surrounding vehicles will be very helpful for drivers to improve their safety and comfort. This thesis provides an interactive model based on a Conditional Variational Autoencoder that predicts the future trajectory, potential lane changes, and braking situations of surrounding vehicles. The proposed model provides the following contributions: At the training phase, the future trajectory of the central ego vehicle is given to the model. Then we combine this future trajectory with a grid-based interactive module that considers the relative motion of the neighboring vehicles. Finally, we use the combined information to predict the probability distribution of the neighboring vehicles' driving maneuvers and trajectories. At the inference phase, the trained model cannot access the future trajectory of the ego vehicle. Only a predicted trajectory using the ego vehicle's past trajectory is provided to the model. We evaluate the model's performance on two highway datasets, HighD and NGSIM. The errors measured by root mean square error (RMSE) are 1.52 m and 5.55 m, respectively, on HighD and NGSIM, slightly worse than the state-of-the-art model PiP.Leitung: Hao Cheng, Bodo Rosenhahn, Monika SesterTeam:Jahr: 2021
![]()
![]()
-
Trajectory Forecasting with Semantic Scene InformationTrajectory prediction, an integral part of the autonomous driving system, has been researched for decades. A multi-path forecast provides many paths compared to a single-path forecast in complex traffic situations. For the multi-path prediction task, three kinds of information are generally required: 1) ego-motion information, 2) dynamic interaction information, and 3) scene information. Dynamic information represents the interaction between a target agent and other agents. Scene information represents the environment information that constrains the movement of road users. However, scenario-specific information can also easily make a model too adaptive to a particular scenario and jeopardize the model's generalization ability to new scenes. The objective of the thesis is to validate whether a proposed scene branch with semantic maps, a kind of scene information, performs well for multiple trajectories prediction on the inD benchmark. The scene branch is added to DCENet, which is based on a Conditional Variational Autoencoder and has superior performance on the inD benchmark. his thesis uses DCENet as the baseline model. Instead of specific scene information, semantic maps are taken as input to extend the DCENet model to avoid the overfitting problem caused by certain scene information. Semantic maps consist of eight channels that indicate different areas in the scenes. Moreover, the visual attention module is incorporated into the scene branch to extract scene contexts. The visual-attention module contains single-source and multi-source attention modules used to extract local and global scene contexts, respectively. In addition, two architecture variations of the scene branch are proposed. In the two architecture variations, semantic maps are first processed by a convolutional neural network (CNN)-based backbone. The first architecture merges the feature maps from the CNN with the visual-attention module and a Long Short-Term Memory (LSTM) module. The second architecture has two stages of processing the feature maps from the CNN. The first stage is to adopt a depth separable convolutional layer to merge the feature maps linearly. The second stage is to pass the combined feature maps into the visual-attention module and an LSTM module. The results tested on the inD benchmark show that the second architecture variation with two-time steps of LSTM is the best among all the performances of the two architecture variations. However, the experimental results from two architecture variations of the scene branch are not as good as the baseline model DCENet. The inferior results might be due to the imbalance of the data diversity across the inD benchmark and the lack of details in semantic maps, even though data balance and augmentation are processed.Leitung: Hao Cheng, Bodo Rosenhahn, Monika SesterTeam:Jahr: 2021
![]()
![]()
-
Traffic Control Recognition Using Speed-Profiles and Image DataIntersection regulator rules are one of the most important elements influencing traffic flow and route choice. As the road networks become increasingly complex, commuters often need up-to-date road traffic conditions from digital maps. Given that using surveying and mapping personnel to inspect and record the latest information of intersection regulations and keep the digital maps updated is highly time-consuming and cost-expensive, therefore a large body of research seeks an automated way for intersection regulator detection. Recently, studies have been using GPS tracks and intersection maps for regulator detection and have achieved good results. This thesis designed a generative model based on a Conditional Variational Autoencoder (CVAE) to predict intersection regulations. To fully extract the temporal features of GPS signals, we use a self-attention mechanism in our network. We assume that the satellite images contain the information of, e.g., intersection geometry and environmental scene contexts, which is beneficial for regulator detection at the intersection. Then, we seek to combine both GPS tracks with the high-resolution satellite images extracted from Google Maps using the coordinates of the given intersection. We have designed three feature combination methods for our network to effectively integrate image features with GPS signals. We conducted experiments on the four networks we designed and compared them to a state-of-the-art method based on a CVAE model. The results show that, on average, our network with a self-attention mechanism is 3% higher than that of the CVAE model measured by the F1 score. It proves that our network can fully extract the temporal features of GPS signals. The results of the other three models, which combine GPS tracks with high-resolution satellite images, are not satisfactory. To find the problem, we designed multiple sets of dropout rates to verify the effectiveness of the image feature extraction network. The results show that the network structure of the image feature extraction we selected cannot effectively extract the features for intersection regulations prediction. We need to explore new network structures to extract image features in the future.Leitung: Hao Cheng, Markus Fidler, Monika SesterTeam:Jahr: 2021
![]()
![]()
-
Predicting Interaction Between Vehicles and Vulnerable Road Users at a Right-Turn IntersectionIn real-world traffic situations, interactions between vehicles and vulnerable road users (VRUs) frequently occur, and injuries caused by vehicles to VRUs account for a large proportion of traffic accidents. Therefore, research on the interaction between vehicles and VRUs is important for traffic safety. This thesis aims to automatically classify the level of risks in the interactions between a target vehicle and the involved VRUs. A Conditional Variational Autoencoder (CVAE)-based deep generative model uses vehicles’ position, velocity, and orientation to predict the future trajectory of the vehicles. Then, potential interactions between the vehicles and VRUs based on the predicted trajectories are classified into five risk levels—collision, serious conflict, slight conflict, potential conflict, and undisturbed passage. A stationary camera collects the traffic data at a busy intersection in Germany, called KoW. This thesis uses the camera calibration method to transform the view angle of the video data. It obtains the position of the road users in the real world by the deep learning model YOLOv4 for object detection and DeepSORT for tracking. The intersection area is divided into a preparation area and a conflict area through the road markings. The trajectory of the approaching vehicle in the preparation area is used as the input data of the prediction model for predicting its trajectory in the conflict area. The model achieved an average accuracy of 90% for the risk classification task on KoW dataset. Another dataset called AIM is leveraged to verify the generality of the model. The model reached the classification performance with an average accuracy of 97%.Leitung: Hao Cheng, Bodo Rosenhahn, Monika SesterTeam:Jahr: 2021
![]()
![]()
-
Identification of Logistic Stopping Points in Big Vehicle Trajectory DataThe advance in positioning technologies has facilitated the generation of spatio-temporal data representing the mobility of different objects in geographical space, namely trajectories. Trajectory data mining, especially on trajectory datasets of immense volume, allows improving traffic problems by analyzing spatio-temporal events. Double (second-row) parking is an example of unusual stopping events, which are often caused by parcel delivery vehicles. One of the solutions for the elimination of second-row parking situations created by parcel providers and their additional consequences, such as potential traffic jams, is the provision of spatial parking spaces for parcel services, so-called logistic stopping points. The objective of this thesis is to suggest logistic stopping points for the Hannover region based on trajectory information generated by parcel delivery providers. The delivery trajectories have to be extracted from the provided big vehicle trajectory dataset. As the result, 4030 trajectories and 46, 589 stops are determined as delivery. Based on the obtained delivery stop information, 2018 logistic stopping points for parcel provider services are suggested for the Hannover region. Additionally, an algorithm for second-row parking situation detection is implemented. The algorithm is applied to the delivery stops that happened in the Linden-Nord district of Hannover. The analysis of the results of this work shows that 80% of the detected second-row parking situations could have been prevented by establishing the suggested logistic stopping points.Leitung: Sester, Feuerhake, Wage, KoetsierTeam:Jahr: 2021
![]()
![]() © M. Karakulina
© M. Karakulina
-
Identification of on-road and separate bicycle lanesCyclists are the most vulnerable participants in the road traffic in these days. Therefore, it is important to protect them, for example, by physically separated bicycle lanes. Continuous position tracking can yield a lot of data, which can help to understand how moving objects behave. This information could be used, e.g. in routing applications aiming to find a more secure route to the users destination. In this thesis the goal is to explore the idea of the identification of bicycle lane types of (OpenStreetMap) road segments using GPS trajectories of bicycles and motorized vehicles. This goal is archieved by applying clustering to the pool of trajectory data. Different distance measures are explored to distinguish between car and bicycle clusters. Three different bicycle lane types are identified within this thesis in the region of Hannover. Each of them can be classified with at least 70 percent accuracy. There are multiple reasons for inaccuracies like GPS positioning errors and the fact that not all cyclists drive on the respective bicycle lanes but on the car lanes.Leitung: Golze, Feuerhake, Prof. Rosenhahn, Prof. SesterTeam:Jahr: 2021
![]()
![]()
-
Using dynamic visual variables for visualizing efficiency in route maps(Un)fortunately, as the world becomes more urbanized and the population density of cities continue to increase, there has been a proportional increase in automobile dependence, which has in turn resulted in high traffic density, increased air pollution, higher road risks, amongst other side effects. This thesis aims to develop dynamic visualization variants based on the dynamic visual variables and evaluate the effectiveness of these variants in communicating route efficiency to users and how we can use the dynamic variables to influence route choice.Leitung: Fuest, SesterTeam:Jahr: 2021
![]()
![]()
-
Segmentation of Linear Terrain Structures in Digital Terrain Models Using Deep learningThe archaeologists are interested in detecting terrain structures related to historical mining in the Harz Region. They could manually inspect regions of interest and find relevant terrain structures, but the task is time-consuming, so the goal of this thesis is to use deep learning techniques to automate this tedious task for archaeologists. Linear feature is considered as one of the most essential terrain features, which can be representations of not only natural productions such as drainage networks or geological lineaments, but also manual parts including pipelines, road networks, and so on. The previous studies mainly utilized different computer vision techniques to detect the linear terrain structures, but it is not able to classify them. In our case, different neural networks are used to realize the semantic segmentation of our interested terrain structures which content hollow ways, pathways, roads, forest paths, and ditches. However, due to the complexity of identifying the linear structures, the segmentation result can be incomplete so that image processing algorithms are applied to refine the results.Leitung: Kazimi, Sester, FidlerTeam:Jahr: 2020
![]()
![]()
-
Interaction Classification Between Vehicles and Vulnerable Road Users at a Right-Turn IntersectionAutomatic interaction classification between vehicles and vulnerable road users at intersections is critical for traffic safety and autonomous driving. To this end, a Conditional Variational Auto-Encoder (CVAE) classifier that uses motion information captured by applying dense optical flow and object information extracted by a state-of-the-art object detector is proposed in this thesis. Built on the CVAE system, this thesis uses convolutional and recurrent neural networks for learning spatiotemporal features from the motion and object information. In order to train the classifier, a large real-world dataset is manually labeled from traffic video recordings collected at a busy intersection. In addition, this thesis applies a self-attention mechanism to enable the model to learn the weights between frame-level probabilities, which enhances the performance of the classifier. Furthermore, a sequence-to-sequence model is taken as the baseline model. Compared with the baseline model, the empirical results of the CVAE model using padding method with attention mechanism demonstrate the highest classification accuracy and the least false negative detections.Leitung: Bodo Rosenhahn, Monika Sester, Hao ChengTeam:Jahr: 2020
![]()
![]()
-
Erkennung von Trajektorienanomalien mittels Spektralclustering und RNN-basiertem AutokodiererDie Erkennung von Anomalien ist wichtig, da anomales Verhalten auf kritische Ereignisse oder Objekte in verschiedenen Forschungsbereichen und Anwendungsgebieten hinweisen kann. Einer dieser Bereiche ist der Verkehr, insbesondere die integrierte städtische Mobilität. Trajektorien von sich bewegenden Objekten sind gute Darstellungen ihres Verhaltens in Überwachungsdaten und nützlich bei der Erkennung anomalen Verhaltens. Einerseits können Trajektorien im Vergleich zu einfachen physischen Merkmalen mehr agentenbasierte, langfristige Informationen liefern. Andererseits benötigen Trajektorie-Daten im Vergleich zu Video-Rohdaten, die gewöhnlich als eine Folge von Bildern dargestellt werden, weniger Speicherplatz und Rechenressourcen. Darüber hinaus verfügen sie über eine Vielzahl von Quellen, wie z.B. GPS-Instrumente und Laser-Scanner.Leitung: Sester, KoetsierTeam:Jahr: 2020
![]()
![]()
-
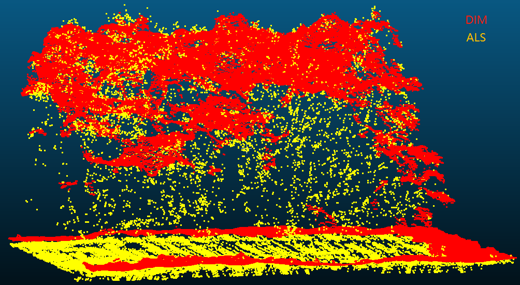
Transformation of Point Clouds using Generative Adversarial NetworksFor their territory, national survey departments have extensive Airborne Laser Scanning (ALS) point clouds with moderate point densities, and a high position and height accuracy. The national survey departments also derive point clouds from aerial flight operations using an algorithm called Dense Image Matching (DIM). These point clouds have a high geometrical and radiometric resolution. Due to being acquired with different sensor systems, ALS and DIM point clouds contain different attributes and behave differently, which makes a joint processing quite difficult. The goal of this thesis is to transform a DIM point cloud this way that it behaves like an ALS point cloud for the following processing steps. Firstly, both point clouds are rasterized, where each raster cell describes the distribution in height for all points within a raster cell. These rasterized images from both point clouds are then used to train a Generative Adversarial Network (GAN) such as the pix2pix network. The network outputs transformed height distributions, which can be back-projected to the original point clouds. Finally, those transformed point clouds can then be tested on different processing steps such as registration, change detection or classification.Team:Jahr: 2020
![]()
![]()
-
Entwicklung von umweltgerechten und stauvermeidenden Routingalgorithmen mittels VerkehrssimulationenAufgrund des ständig wachsenden Verkehrsaufkommens in städtischen Umgebungen und damit aufkommender Probleme wie eine erhöhte Luftverschmutzung, spielen umwelt-orientierte Ansätze zur Erreichung einer besseren Stadtverträglichkeit des Verkehrs eine immer wichtigere Rolle. Diese Arbeit befasst sich mit der Entwicklung von umwelt-gerechten Routingalgorithmen, sowie deren Validierung im Rahmen von Verkehrssimulationen. Der verwendete Routingalgorithmus ist der A* - Algorithmus unter Nutzung der jeweils entwickelten Kriterien als Gewichte.Leitung: Sester, FuestTeam:Jahr: 2019
![]()
![]()
-
Multi-Path Prediction of Mixed Traffic Trajectories in Shared SpacesIn shared spaces, road signs, signals, and markings are removed to allow mixed traffic directly interact with each other. The traffic engineer Reid defined it as a street encouraging pedestrian movement and reducing the dominance of vehicles without explicit traffic rules. All users have to follow informal social protocols and negotiation to use the road resources, and avoid any potential collisions. The lack of regulations makes interactions between multimodal road users more complex compared with conventional designs. With the availability of large scale datasets and the development of deep learning techniques in sequence modeling and prediction, deep learning approaches are widely used for trajectory prediction.Leitung: Hao Cheng, Prof. Sester and Prof. FidlerTeam:Jahr: 2019
-
Scene Context-Aware Trajectory Prediction in Shared SpaceIn shared spaces, road signs, signals, and markings are removed to allow mixed traffic directly interact with each other. At a micro level, understanding how they behave and how we can foresee their behavior after a short observation time are crucial to intent detection and autonomous driving, and traffic management in shared spaces.Leitung: Hao Cheng, Prof. Sester and Prof. FidlerTeam:Jahr: 2019
![]()
![]()
-
Residual Learning for Mixed Traffic Prediction in Shared SpaceIn recent years, with the increased availability of computational power and large-scale datasets, data--driving approaches, especially Deep Learning approaches, have been largely used for trajectory modeling. Nevertheless, predicting mixed traffic trajectories in shared space is not trivial.Leitung: Hao Cheng, Prof. Sester and Prof. FidlerTeam:Jahr: 2019
-
A Study of State-of-the-Art DL Methods for Mixed Traffic Trajectory PredictionIn recent years, with the increased availability of computational power and large-scale datasets, data-driving approaches, especially Deep Learning (DL) approaches, have been largely used for trajectory modeling. The performance for pedestrian trajectory prediction in crowded spaces has been improved year by year, such as the state-of-the-art Social-LSTM (Alahi et al., 2016) CVAE (Lee et al., 2017), and Social-GAN (Gupta et al., 2018). The goal of this master thesis is to apply such stat-of-the-art DL approaches in a more challenging environment—shared space—for trajectory prediction with mixed traffic agents and compare their performance.Leitung: Hao Cheng, Prof. Sester and Prof. FidlerTeam:Jahr: 2019
-
Automatische Parametrische Beschreibung von BodendenkmalenDie Untersuchung von Bodendenkmälern liefert wichtige Erkenntnisse zur Entwicklung der Kulturlandschaft in Deutschland. Sie lässt Rückschlüsse über das Leben in vergangenen Epochen und die Veränderung zwischen den Zeitaltern zu. Die Lagebestimmung oder die messtechnische Erfassung der Bodendenkmäler ist nicht immer einfach. Oftmals lassen sich die Objekte schwer erkennen oder befinden sich an schwer zugänglichen Stellen. Airborne Laserscanning eröffnet hierbei eine vergleichsweise neue Methode der archäologischen Prospektion. Aus den erzeugten Laserscannerdaten lassen sich hochauflösende flächendeckende Geländemodelle erzeugen, mit denen auch vorher unentdeckte Bodendenkmäler in Wäldern erkannt werden können. Die auf diese Weise erzeugte Datengrundlage bietet nicht nur neue Möglichkeiten, sondern auch neue Herausforderungen. Durch die hohen Datenmengen stellt sich die Frage nach der Bearbeitungszeit und die damit verbundene hohe Arbeitszeitbelastung. Um diesem Problem zu begegnen, ist es sinnvoll möglichst viele Prozesse zu automatisieren.Leitung: Frank Thiemann, Monika SesterTeam:Jahr: 2018
![]()
![]()
-
Traffic-sign Recognition from Street-level Photos: a Deep Learning ApproachThe scope of this thesis is the recognition of traffic-signs from street-level images. A state-of-the-art deep learning detection algorithm is used, the Single Shot Multi-box detector (SSD) and within the thesis its performance is validated experimentally by examining different training strategies.Leitung: Prof. Dr. Bernhard Roth, Co-advisor: Prof. Monika Sester, Supervisor: Stefania ZourlidouTeam:Jahr: 2018Laufzeit: 2018
![]()
![]()
-
Automatische Anreicherung von Routenbeschreibungen zur Ausbildung einer kognitiven KarteVon aktuellen Navigationssystemen genutzte Anweisungen beschränken sich üblicherweise auf Entfernungs- und Richtungsangaben (beispielsweise "Biegen Sie in 100 m links auf die Nienburger Straße ein"). Auf diese Weise erreicht der Nutzer zwar das Ziel, hat anschließend jedoch Schwierigkeiten sich eigenständig zu orientieren.Leitung: Sester, FeuerhakeTeam:Jahr: 2017Laufzeit: 2017
![]()
![]()
-
Geomarketing: Visualisierung von ImmobilieninformationenLeitung: Sester, DahindenTeam:Jahr: 2011Laufzeit: 2011
![]()
![]()
-
SNP Analytics – Ein Werkzeug zur visuellen Analyse des Besucherverhaltens im Schweizerischen NationalparkLeitung: SesterTeam:Jahr: 2010Laufzeit: 2010
![]()
![]()


























































Offene Bachelorarbeiten
-
Map-based storytelling of historical sea voyages with a vague spatiotemporal data basisThe thesis topic is related to the DiViAS project (digitization, visualization and analysis of collection items) which brings together scientific methods and practices for digitizing, researching and representing collections from colonial contexts. The project involves developing new approaches for making sense of the information derived from historical sources such as logbooks or travel reports. One of the project goals is to make the movements of ships, people and objects traceable, which can be facilitated by cartographic representations of these movements. In fact, many of these processes can only be understood in a temporal context. Since the information provided in the historical sources is oftentimes vague, inaccurate or incomplete, a visual representation using narrative techniques such as storymapping may facilitate understanding the spatiotemporal sequence of the events that happened throughout the journey.Leitung: Fuest, SesterJahr: 2024
![]()
![]()
-
Detection of Signatures in old Maps using Deep LearningOld maps contain a lot of interesting information of the past reality. Most of maps are, however, only available in analogue form, and thus difficult to query and analyse automatically. The goal of this thesis is to explore modern deep learning methods to automatically detect signatures on old maps. There will be a concentration on certain types of objects, e.g. trees or buildings.Leitung: Thiemann, SesterJahr: 2023
![]()
![]()
-
Bestimmung von Mustern in FahrzeugtrajektorienDie Bewegungstrajektorien von Fahrzeugen erlauben Rückschlüsse auf raum-zeitliche Situationen. So können beispielsweise Haltepunkte detektiert werden oder auch Stausituationen, oder auch Anomalien wie temporär nicht zu befahrende Straßensegmente. In der Arbeit sollen in einem großen Trajektoriendatenbestand solche Muster automatisch erkannt werden. Der Datenbestand umfasst sehr viele Trajektorien. Bei Interesse kann ein Schwerpunkt auf die skalierbare Datenanalyse mittels Hadoop und Spark gelegt werden. Je nach Schwerpunkt ist die Arbeit sowohl als Bachelor- als auch als Masterarbeit bearbeitbar.Team:Jahr: 2020
![]()
![]()





Offene Masterarbeiten
-
Calculation of the itinerary of historical sea voyages with a vague spatiotemporal data basisThe thesis topic is related to the DiViAS project (digitization, visualization and analysis of collection items) which brings together scientific methods and practices for digitizing, researching and representing collections from colonial contexts. The project involves developing new approaches for making sense of the information derived from historical sources such as logbooks or travel reports. One of the project goals is to make the movements of ships, people and objects traceable, which can be facilitated by cartographic representations of these movements. Since the information provided in the historical sources is oftentimes vague, inaccurate or incomplete, the challenge here is to estimate the itinerary of a ship by taking a certain degree of vagueness into account.Leitung: Fuest, SesterJahr: 2024
![]()
![]() © Staatsbibliothek zu Berlin ‐ Kartenabteilung
© Staatsbibliothek zu Berlin ‐ Kartenabteilung
-
Map-based storytelling of historical sea voyages with a vague spatiotemporal data basisThe thesis topic is related to the DiViAS project (digitization, visualization and analysis of collection items) which brings together scientific methods and practices for digitizing, researching and representing collections from colonial contexts. The project involves developing new approaches for making sense of the information derived from historical sources such as logbooks or travel reports. One of the project goals is to make the movements of ships, people and objects traceable, which can be facilitated by cartographic representations of these movements. In fact, many of these processes can only be understood in a temporal context. Since the information provided in the historical sources is oftentimes vague, inaccurate or incomplete, a visual representation using narrative techniques such as storymapping may facilitate understanding the spatiotemporal sequence of the events that happened throughout the journey.Leitung: Fuest, SesterJahr: 2024
![]()
![]()
-
Automatische Annotation historischer KartenSuchmaschinen ermöglichen einen schnellen und gezielten Zugriff auf gespeicherte Inhalte im Internet. Voraussetzung dafür ist jedoch, dass diese Inhalte durch Schlüsselwörter oder Metadaten beschrieben sind. Bei der Suche nach Karten werden typischerweise die Namen oder Kartentypen als Schlüsselwörter verwendet. Will man jedoch auf Karteninhalte zugreifen, zum Beispiel auf Karten mit Laubwäldern, ist es notwendig, dass diese Karteninhalte auch durch Metadaten beschrieben sind. Gleichermaßen sind solche Beschreibungen auch erforderlich, um Blinden oder Menschen mit visuellen Einschränkungen einen Zugang zu ermöglichen Hier setzt die Masterarbeit an: Mit Hilfe von Deep-Learning-Methoden soll eine sogenannte semantische Segmentierung der Karteninhalte in mehrere Landnutzungsklassen vorgenommen werden. Diese Informationen sollen dann in geeigneter Form als Metadaten beschrieben und den Daten hinzugefügt werden.Leitung: Yuan, SesterJahr: 2024
![]()
![]()
-
Dynamic Urban Digital Twin Representation via Spatio-Temporal Voxel MeshingUrban digital twins are virtual models that integrate real-time data to simulate and analyze cities, providing valuable insights for urban planning, traffic management, environmental monitoring, and disaster response. A common approach for creating these 3D models is voxel-based representation, where urban environments are represented by small cubic units (voxels). While offering high resolution, updating such detailed models in real time can be computationally expensive, especially for large urban areas. In highly detailed voxel models, updating each individual voxel—such as in a 10 cm resolution grid—can become inefficient, especially when many areas of the city remain stable over time.Leitung: Shkedova, SesterJahr: 2024
![Dynamic Urban Digital Twin Representation via Spatio-Temporal Voxel Meshing]()
![Dynamic Urban Digital Twin Representation via Spatio-Temporal Voxel Meshing]()
-
Interactive Visualization of Parking Occupancy over Time in a 3D Urban Digital Twin Web ApplicationIntroduction In today's rapidly growing urban environments, efficient parking management has become a crucial challenge. As cities expand, the demand for parking spaces increases, making it essential to monitor parking occupancy in real-time or over time. Integrating this information into modern virtual 3D models of real-world cities (urban digital twins) provides an effective way to visualize parking space availability, helping reduce congestion and optimize urban mobility. However, the challenge lies in effectively visualizing parking occupancy within a 3D urban model. Unlike traditional 2D maps, 3D visualizations offer a more immersive and detailed perspective, but conveying time-dependent data—such as parking space availability at different times—within this context can be complex. Traditional 2D visualizations often use color codes or simple markers to represent occupancy status, but translating this into a 3D environment requires developing an intuitive system that allows users to interact with both the spatial and temporal dimensions of the data. The goal of this thesis is to design an interactive and user-friendly visualization approach that presents parking occupancy information in a way that allows users to explore both current occupancy states and historical data within a 3D urban digital twin.Leitung: Shkedova, SesterJahr: 2024
![Interactive Visualization of Parking Occupancy over Time in a 3D Urban Digital Twin Web Application]()
![Interactive Visualization of Parking Occupancy over Time in a 3D Urban Digital Twin Web Application]()
-
Localization of mobile objects in the Absence of GPS/GNSS: A Hybrid 2D-3D ApproachIn today's dynamic landscape of autonomous vehicles and robotics, accurate and real-time localization is imperative. While 3D methods have been employed for vehicle localization, their time-consuming nature poses challenges. This research seeks to a novel hybrid approach, bridging the efficiency of 2D methods with the precision of 3D refinement, to offer a faster and more robust solution for vehicle localization.Leitung: Mortazavi, SesterJahr: 2023
![]()
![]()
-
Detection of Signatures in old Maps using Deep LearningOld maps contain a lot of interesting information of the past reality. Most of maps are, however, only available in analogue form, and thus difficult to query and analyse automatically. The goal of this thesis is to explore modern deep learning methods to automatically detect signatures on old maps. There will be a concentration on certain types of objects, e.g. trees or buildings.Leitung: Thiemann, SesterJahr: 2023
![]()
![]()
-
Bestimmung von Mustern in FahrzeugtrajektorienDie Bewegungstrajektorien von Fahrzeugen erlauben Rückschlüsse auf raum-zeitliche Situationen. So können beispielsweise Haltepunkte detektiert werden oder auch Stausituationen, oder auch Anomalien wie temporär nicht zu befahrende Straßensegmente. In der Arbeit sollen in einem großen Trajektoriendatenbestand solche Muster automatisch erkannt werden. Der Datenbestand umfasst sehr viele Trajektorien. Bei Interesse kann ein Schwerpunkt auf die skalierbare Datenanalyse mittels Hadoop und Spark gelegt werden. Je nach Schwerpunkt ist die Arbeit sowohl als Bachelor- als auch als Masterarbeit bearbeitbar.Team:Jahr: 2020
![]()
![]()

















