Collaborative acquisition of predictive maps
| Team: | Schachtschneider, Brenner |
| Year: | 2017 |
| Funding: | DFG-Graduiertenkolleg i.c.sens |
Self-driving cars and robots that run autonomously over long periods of time need high precision and up-to-date models of the environment. Natural environments contain dynamic objects and change over time. Since a permanent observation of “everything” is impossible and there will always be a first time visit of the changed area, a map that takes into account the possibility of change is needed.
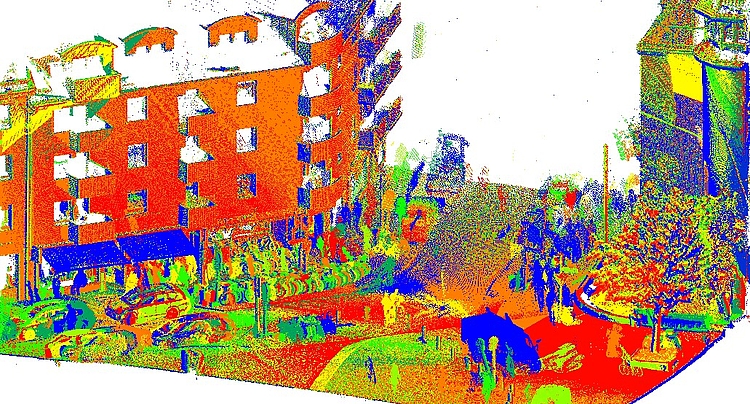
Changes can occur abruptly, gradually, or even periodically. For example, a new object can appear in the environment and it can stay there permanently, like a new building, or it can be only temporal, like a parked car. Objects can move or change their appearance, like open or closed doors. Surfaces can wear off and vegetation can grow. Knowing the temporal behaviour of different objects or areas in the environment improves the reliability of a map and can help to predict their future status. The aim of this project is to create an updatable and extendable long-term map that takes into account the dynamics of an urban environment. Therefore, changes shall also be divided by the duration of stability, e.g. days, weeks, months, and years. Moreover, a confidence score that represents the likelihood of an object/ area in the map to be static (for a defined period) will be stored. As a result, observations from one year of biweekly measurements on a 23 km route in Hanover will be merged into a comprehensive map.