Deep learning of user behavior in road space - particularly in shared spaces
| Team: | Cheng, Sester |
| Year: | 2018 |
| Funding: | DFG-Graduiertenkolleg SocialCars |
| Duration: | 2014-2023 |
| Is Finished: | yes |
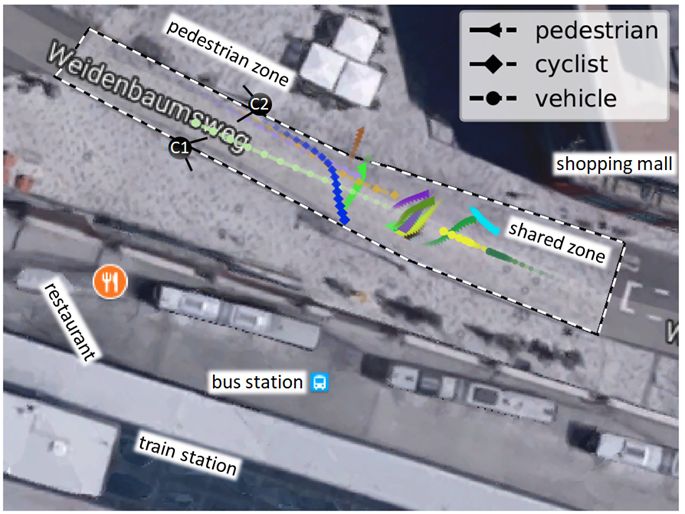
The project aims to investigate the behaviour of different road users in unregulated spaces, i.e. spaces open to all road users. Existing approaches are based on a given movement model, which describes the individual behaviour as well as the interactive behaviour of different road users. In this project, this behavior will be analyzed by observations of trajectories. The analysis will be done by means of deep learning. The trajectories will be derived from camera observations. In order to determine the behavior, the corresponding spatial and temporal constraints will be considered in addition to the trajectories. The aim is to derive a behavioural model from the data. Information about the DFG Research Training Group SocialCars can be found here.