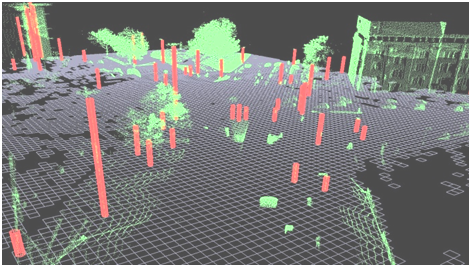
Landmark-based localization
| Team: | Schlichting, Brenner |
| Year: | 2017 |
Within the project, new approaches are developed for a highly accurate localization of vehicles relative to their environment. Furthermore, it is analyzed how detailed descriptions of the environment can be used for interpreting the scenery, for example for active driver assistance systems