Spatiotemporal Calibration between a Helmet Mapping System and the HoloLens Augmented Reality System
| Led by: | Kamalasanan, Busch, Sester |
| Team: | Özgün Karatas |
| Year: | 2021 |
| Is Finished: | yes |
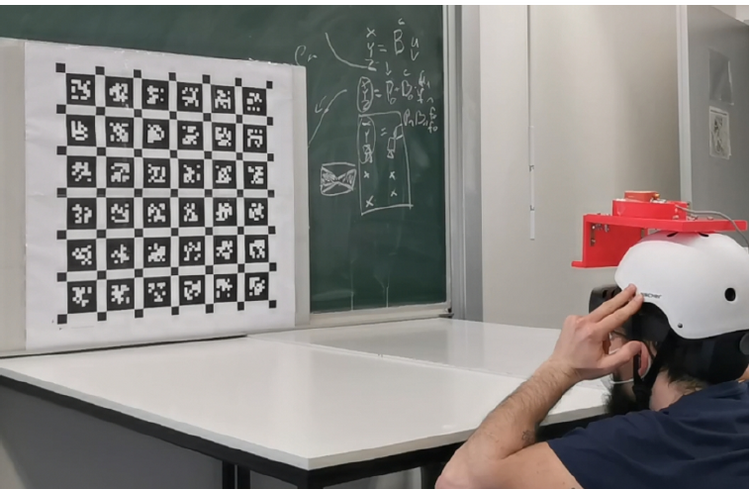
Mobile mapping systems are used to map indoor environments by utilising LIDAR sensors. These sensors when worn with a helmet via the Helmet mapping system (HMS) can also be integrated with Augmented reality (AR) devices like the HoloLens 2. Such integration can be beneficial for real-time 3D visualisation of sensor data. To achieve an integrated system, the HMS and AR device needs to be precisely time synchronized matching the different sensors rates running on different operating systems.
The objective of this thesis is to achieve time synchronization and rigid body transformation between a helmet-mounted mapping systems (HMS) equipped with an Xsens IMU module and an Augmented Reality (AR) system HoloLens 2. Pedestrian motion was tested to find patterns for data synchronization using human movement only.
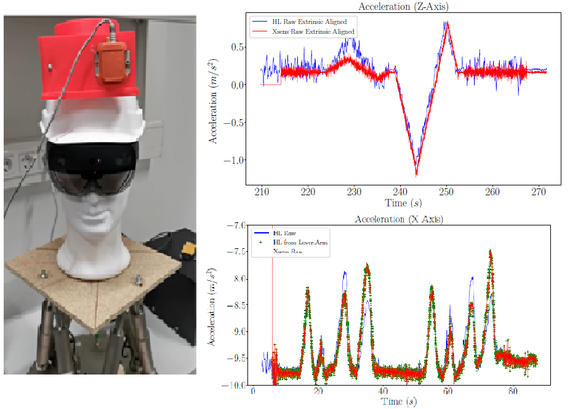
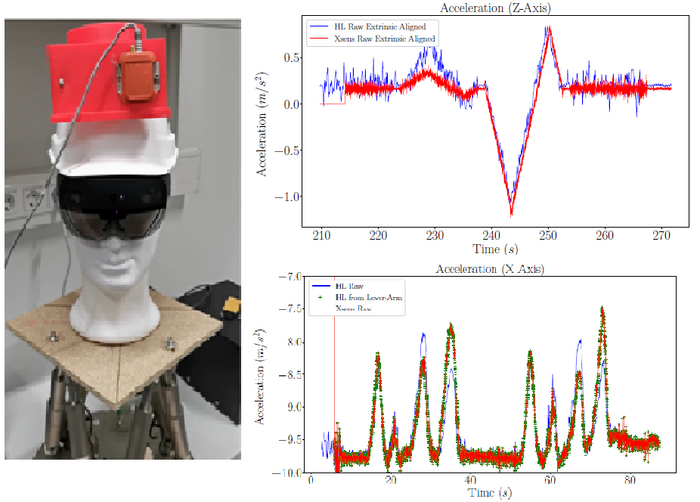
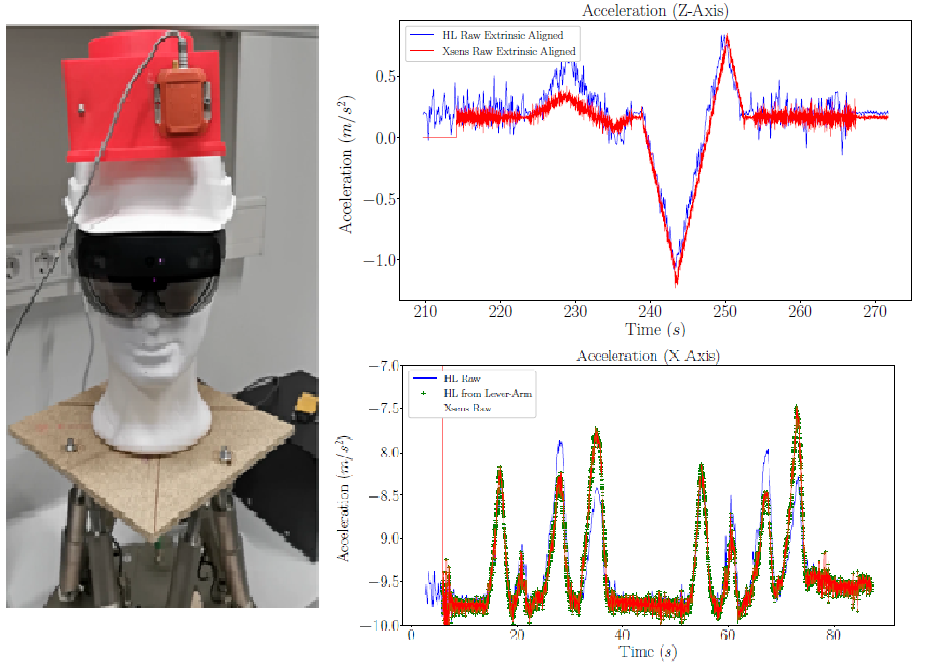
The left figure shows the apparatus for rigid body experiment for controlled axis excitement. The picture on the right shows the results of the time synchronization applied to inertial data on the rigid body against human motion. Using a series of human and rigid body experiments carried out with a calibration board, the framework is verified for the accuracy and integrity against state-of-the-art kalibr calibration framework.