Trajectory anomaly detection using spectral clustering and RNN-based auto-encoder
| Led by: | Sester, Koetsier |
| Team: | Yao Li |
| Year: | 2020 |
| Is Finished: | yes |
Anomaly detection is important, because anomalous behavior may indicate critical events or objects within diverse research areas and application domains. One of such domains is transport, especially integrated urban mobility. Trajectories of moving objects are good representations of their behaviors in surveillance data and useful in detecting anomalous behavior. On one hand, trajectories can provide more agent-based, long-term information comparing with simple physical features. On the other hand, comparing with raw video data, which is usually represented as a sequence of images, trajectory data requires less storage space and computational resources. Moreover, it has a wide variety of sources, such as GPS instruments and laser-scanners.
Intuitively, anomaly is something that is different from mainstream. However, due to the variety and complexity of the device location, sampling rate and road structure in real-world scenarios, the extracted trajectories usually vary in spatio-temporal characteristics. Therefore, appropriately defining and analyzing trajectory properties and detecting anomalous patterns is a challenging task.
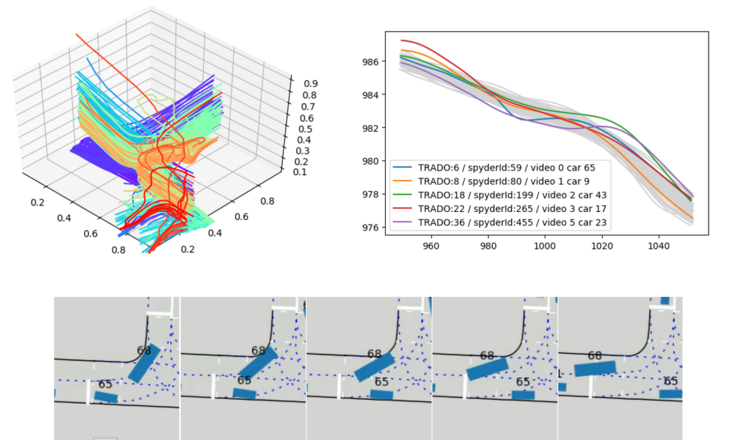
In this paper, typical examples of traffic anomalies are divided into two catalogs: cluster-based and other anomalies. The former can be detected by cluster algorithms. For instance, U-turns and driving in the wrong direction. The later are all anomalies that not belong to cluster-based anomalies, such as near-collision, over-speeding, reverse and emergence stop.
Several anomaly detection approaches, including supervised and unsupervised methods, are applied, compared and optimized on three datasets. Experiments show that the spectral clustering and thresholding based on auto-encoder distance performs the most accurate results.